Paper:
Position Control of Machine Tool Moving Axis Based on Sliding Mode Control
Wangyong He*,**,†, Sanqiu Liu*,**, Zhen Zhao***, and Kui Jie*,**
*School of Automation, China University of Geosciences
No.388 Lumo Road, Hongshan District, Wuhan, Hubei 430074, China
**Engineering Research Center of Intelligent Technology for Geo-Exploration, Ministry of Education
No.388 Lumo Road, Hongshan District, Wuhan, Hubei 430074, China
***Qinghai Bureau of Environmental Geology Exploration
No.77 Haiyan Road, Chengxi District, Xining, Qinghai 810001, China
†Corresponding author

Aiming at a high-precision tracking performance of the control of a machine tool moving axis, this study established a system mathematical model considering the elastic deformation of the ball screw. Then, a sliding mode controller was designed to suppress the influence of uncertainty on the control performance. Next, an extended state observer was designed to observe the system state and disturbance and provide feedback to the sliding mode controller for position control. Finally, the correctness of the designed sliding mode control and extended state observer were proved by MATLAB simulation analysis.
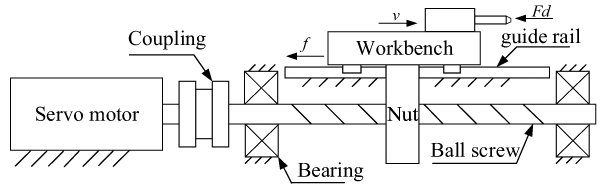
This paper studied the position servo control of the ball screw structure in machine tool moving axis, and considered the influences of the load disturbance of the workbench and the elastic deformation of the ball screw on the position accuracy
- [1] Z. Zhou, B. Zhang, and D. Mao, “Robust Sliding Mode Control of PMSM Based on Rapid Nonlinear Tracking Differentiator and Disturbance Observer,” Sensors, Vol.18, No.4, Article No.1031, 2018.
- [2] Y. Yan et al., “Robust Speed Regulation for PMSM Servo System with Multiple Sources of Disturbances via an Augmented Disturbance Observer,” IEEE/ASME Trans. on Mechatronics, Vol.23, No.2, pp. 769-780, 2018.
- [3] H. Sira-Ramírez et al., “On the Control of the Permanent Magnet Synchronous Motor: An Active Disturbance Rejection Control Approach,” IEEE Trans. on Control Systems Technology, Vol.22, No.5, pp. 2056-2063, 2014.
- [4] J. Hu, Y. Qiu, and H. Lu, “Adaptive Robust Nonlinear Feedback Control of Chaos in PMSM System with Modeling Uncertainty,” Applied Mathematical Modelling, Vol.40, Nos.19-20, pp. 8265-8275, 2016.
- [5] S.-K. Kim, J.-S. Lee, and K.-B. Lee, “Robust Speed Control Algorithm with Disturbance Observer for Uncertain PMSM,” Int. J. of Electronics, Vol.105, No.8, pp. 1300-1318, 2018.
- [6] X. Zhang et al., “Nonlinear Speed Control for PMSM System Using Sliding-Mode Control and Disturbance Compensation Techniques,” IEEE Trans. on Power Electronics, Vol.28, No.3, pp. 1358-1365, 2013.
- [7] B. Zhang and Y. Li, “A PMSM Sliding Mode Control System Based on Model Reference Adaptive Control,” Proc. of the 3rd Int. Power Electronics and Motion Control Conf. (IPEMC 2000), Vol.1, pp. 336-341, 2000.
- [8] M.-S. Wang and T.-M. Tsai, “Sliding Mode and Neural Network Control of Sensorless PMSM Controlled System for Power Consumption and Performance Improvement,” Energies, Vol.10, No.11, Article No.1780, 2017.
- [9] C. Zhang et al., “Demagnetization Faults Robust Detection Method Based on an Adaptive Sliding Mode Observer for PMSM,” J. Adv. Comput. Intell. Intell. Inform., Vol.20, No.7, pp. 1127-1134, 2016.
- [10] S.-H. Chang et al., “Robust Current Control-Based Sliding Mode Control with Simple Uncertainties Estimation in Permanent Magnet Synchronous Motor Drive Systems,” IET Electric Power Applications, Vol.4, No.6, pp. 441-450, 2010.
- [11] J.-L. Song, J. Xiao, and X.-H. Xu, “Modeling and Control Method of the Inverted Pendulum System,” J. of Northeastern University (Natural Science), Vol.23, No.4, pp. 333-337, 2002 (in Chinese).
- [12] H. Liu and S. Li, “Speed Control for PMSM Servo System Using Predictive Functional Control and Extended State Observer,” IEEE Trans. on Industrial Electronics, Vol.59, No.2, pp. 1171-1183, 2012.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.