Paper:
Three-Dimensional Stereo Vision Tracking of Multiple Free-Swimming Fish for Low Frame Rate Video
Maria Gemel B. Palconit*,†, Ronnie S. Concepcion II*, Jonnel D. Alejandrino*, Michael E. Pareja*, Vincent Jan D. Almero*, Argel A. Bandala*, Ryan Rhay P. Vicerra**, Edwin Sybingco*, Elmer P. Dadios**, and Raouf N. G. Naguib***
*Electronics and Communications Engineering, De La Salle University
2401 Taft Avenue, Malate, Manila 1004, Philippines
**Manufacturing and Management Engineering, De La Salle University
2401 Taft Avenue, Malate, Manila 1004, Philippines
***Liverpool Hope University
Hope Park, Taggart Avenue, Liverpool L16 9JD, UK
†Corresponding author

Three-dimensional multiple fish tracking has gained significant research interest in quantifying fish behavior. However, most tracking techniques use a high frame rate, which is currently not viable for real-time tracking applications. This study discusses multiple fish-tracking techniques using low-frame-rate sampling of stereo video clips. The fish were tagged and tracked based on the absolute error of the predicted indices using past and present fish centroid locations and a deterministic frame index. In the predictor sub-system, linear regression and machine learning algorithms intended for nonlinear systems, such as the adaptive neuro-fuzzy inference system (ANFIS), symbolic regression, and Gaussian process regression (GPR), were investigated. The results showed that, in the context of tagging and tracking accuracy, the symbolic regression attained the best performance, followed by the GPR, that is, 74% to 100% and 81% to 91%, respectively. Considering the computation time, symbolic regression resulted in the highest computing lag of approximately 946 ms per iteration, whereas GPR achieved the lowest computing time of 39 ms.
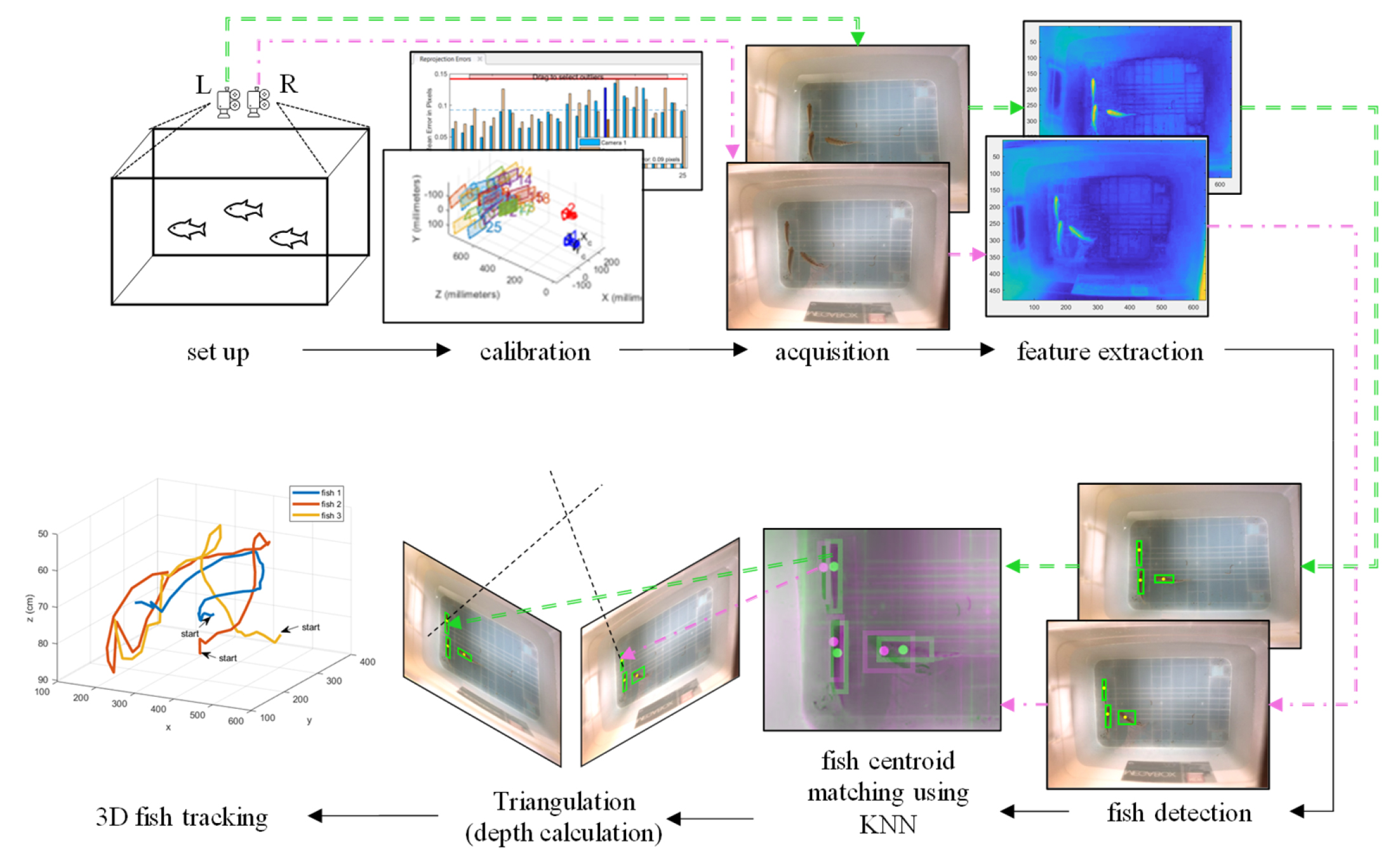
Proposed method of fish tracking
- [1] A. R. F. Quiros et al., “A genetic algorithm and artificial neural network-based approach for the machine vision of plate segmentation and character recognition,” 8th Int. Conf. Humanoid, Nanotechnology, Inf. Technol. Commun. Control. Environ. Manag. (HNICEM 2015), 2015.
- [2] R. S. Concepcion et al., “Arabidopsis Tracker: A Centroid-Based Vegetation Localization Model for Automatic Leaf Canopy Phenotyping in Multiple-Pot Cultivation System,” 2020 IEEE 12th Int. Conf. Humanoid, Nanotechnology, Inf. Technol. Commun. Control. Environ. Manag. (HNICEM 2020), 2020.
- [3] R. G. De Luna, E. P. Dadios, and A. A. Bandala, “Automated Image Capturing System for Deep Learning-based Tomato Plant Leaf Disease Detection and Recognition,” 2018 IEEE Region 10 Conf. (TENCON 2018), pp. 1414-1419, 2019.
- [4] M. C. D. Fernandez et al., “Simultaneous face detection and recognition using Viola-Jones algorithm and Artificial Neural Networks for identity verification,” 2014 IEEE Region 10 Symp., pp. 672-676, 2014.
- [5] W. Luo et al., “Multiple object tracking: A literature review,” Artif. Intell., Vol.293, Article No.103448, 2021.
- [6] C. Xia et al., “Aquatic Toxic Analysis by Monitoring Fish Behavior Using Computer Vision: A Recent Progress,” J. Toxicol., Vol.2018, Article No.2591924, 2018.
- [7] C. Beyan, V.-M. Katsageorgiou, and R. B. Fisher, “Extracting statistically significant behaviour from fish tracking data with and without large dataset cleaning,” IET Comput. Vis., Vol.12, No.2, pp. 162-170, 2018.
- [8] L. Yang et al., “Computer Vision Models in Intelligent Aquaculture with Emphasis on Fish Detection and Behavior Analysis: A Review,” Archives of Computational Methods in Engineering, Vol.28, pp. 2785-2816, 2020.
- [9] M. G. B. Palconit et al., “Towards Tracking: Investigation of Genetic Algorithm and LSTM as Fish Trajectory Predictors in Turbid Water,” 2020 IEEE Region 10 Conf. (TENCON 2020), pp. 744-749, 2020.
- [10] A. Pérez-Escudero et al., “IdTracker: Tracking individuals in a group by automatic identification of unmarked animals,” Nat. Methods, Vol.11, pp. 743-748, 2014.
- [11] J. R. H. Cooke et al., “Effect of depth information on multiple-object tracking in three dimensions: A probabilistic perspective,” PLoS Computational Biology, Vol.13, No.7, 2017.
- [12] D. J. Harris et al., “Testing the Effects of 3D Multiple Object Tracking Training on Near, Mid and Far Transfer,” Frontiers in Psychology, Vol.11, Article No.196, 2020.
- [13] Z. Tang and J.-N. Hwang, “MOANA: An Online Learned Adaptive Appearance Model for Robust Multiple Object Tracking in 3D,” IEEE Access, Vol.7, pp. 31934-31945, 2019.
- [14] X. Liu et al., “3-D Video Tracking of Multiple Fish in a Water Tank,” IEEE Access, Vol.7, pp. 145049-145059, 2019.
- [15] Z. Wu et al., “Tracking a large number of objects from multiple views,” 2009 IEEE 12th Int. Conf. on Computer Vision, pp. 1546-1553, 2010.
- [16] Z. Qian et al., “Skeleton-based 3D tracking of multiple fish from two orthogonal views,” Proc. of 2nd CCF Chinese Conference (CCCV 2017), Communications in Computer and Information Science book series, Vol.771, pp. 25-36, 2017.
- [17] S. H. Wang et al., “3D tracking swimming fish school using a master view tracking first strategy,” Proc. 2016 IEEE Int. Conf. Bioinforma. Biomed. (BIBM 2016), pp. 516-519, 2017.
- [18] M. K. Moghimi and F. Mohanna, “Real-time underwater image enhancement: a systematic review,” J. Real-Time Image Process, doi: 10.1007/s11554-020-01052-0, 2021.
- [19] M. Saberioon et al., “Application of machine vision systems in aquaculture with emphasis on fish: state-of-the-art and key issues,” Rev. Aquac., Vol.9, No.4, pp. 369-387, 2017.
- [20] D. Karaboga and E. Kaya, “Adaptive network based fuzzy inference system (ANFIS) training approaches: a comprehensive survey,” Artif. Intell. Rev., Vol.52, No.4, pp. 2263-2293, 2019.
- [21] M. A. Rosales et al., “Non-Invasive Glycosylated Hemoglobin Monitoring using Artificial Neural Network and Optimized SVM,” The 9th Int. Symp. on Computational Intelligence and Industrial Applications (ISCIIA 2020), 2A1-1-4, 2020.
- [22] J. Alejandrino et al., “Congestion Detection in Wireless Sensor Networks Based on Artificial Neural Network and Support Vector Machine,” 2020 IEEE 12th Int. Conf. Humanoid, Nanotechnology, Inf. Technol. Commun. Control. Environ. Manag. (HNICEM 2020), 2020.
- [23] P. Li and S. Chen, “A review on Gaussian Process Latent Variable Models,” CAAI Trans. Intell. Technol., Vol.1, No.4, pp. 366-376, 2016.
- [24] M. G. B. Palconit et al., “Adaptive Compensator of Magnetic Levitation System using Symbolic Regression,” IEEE Region 10 Conf. (TENCON 2020), pp. 1363-1367, 2020.
- [25] M. Quade et al., “Prediction of dynamical systems by symbolic regression,” Phys. Rev. E, Vol.94, No.1, pp. 1-15, 2016.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.