Paper:
Operation Skill Acquisition and Fuzzy-Rule Extraction for Drone Control Based on Visual Information Using Deep Learning
Yoichiro Maeda*, Kotaro Sano**, Eric W. Cooper*, and Katsuari Kamei*
*Ritsumeikan University
1-1-1 Noji-higashi, Kusatsu, Shiga 525-8577, Japan
**OKI Crosstech Co., Ltd.
2-7-5 Minamisuna, Koto, Tokyo 136-0076, Japan

In recent years, much research on the unmanned control of a moving vehicle has been conducted, and various robots and motor vehicles moving automatically are being used. However, the more complicated the environment is, the more difficult it is for the autonomous vehicles to move automatically. Even in such a challenging environment, however, an expert with the necessary operation skill can sometimes perform the appropriate control of the moving vehicle. In this research, a method for learning a human’s operation skill using a convolutional neural network (CNN) and setting visual information for input is proposed for learning more complicated environmental information. A CNN is a kind of deep-learning network, and it exhibits high performance in the field of image recognition. In this experiment, the operation knowledge was also visualized using a fuzzy neural network with obtained input-output maps to create fuzzy rules. To verify the effectiveness of this method, an experiment involving operation skill acquisition by some subjects using a drone control simulator was conducted.
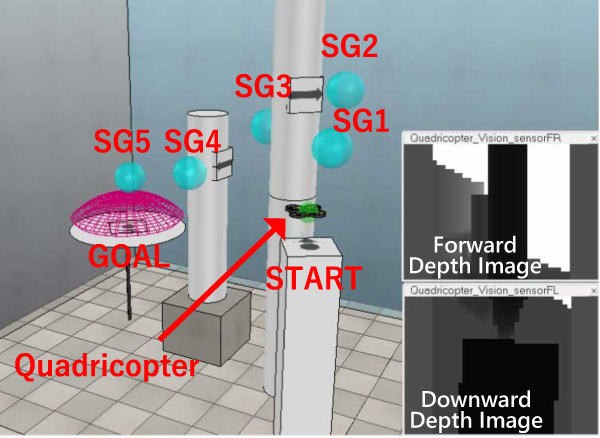
Experiment course in drone simulator
- [1] S. Yasunobu and T. Matsubara, “Fuzzy Target Acquired by Reinforcement Learning for Parking Control,” Proc. of SICE Annual Conf. 2003 (SICE2003), pp. 1303-1308, 2003.
- [2] S. Suzuki, Y. Sanematsu, and H. Takahara, “Analysis of Human Pilot Maneuver Using Neural Network Modeling,” Proc. of the 24th Int. Congress of the Aeronautical Sciences (ICAS 2004), pp. 1-7, 2004.
- [3] M. Takeuchi, J. Shimodaira, Y. Amaoka, S. Hamatani, H. Hirai, and F. Miyazaki, “Reconstruction of Human Skills by Using PCA and Transferring them to a Robot,” J. Robot. Mechatron., Vol.26, No.1, pp. 51-58, 2014.
- [4] K. Noda, H. Arie, Y. Suga, and T. Ogata, “Multimodal integration learning of robot behavior using deep neural networks,” Robotics and Autonomous Systems, Vol.62, Issue 6, pp. 721-736, 2014.
- [5] K. Nonami, F. Kendoul, S. Suzuki, W. Wang, and D. Nakazawa, “Autonomous Flying Robots,” Springer, 2010.
- [6] V. M. Becerra, “Autonomous Control of Unmanned Aerial Vehicles,” Electronics, Vol.8, No.4, Article No.452, doi: 10.3390/electronics8040452, 2019.
- [7] R. Shakeri, M. A. Ali-Garadi, A. Badawy, A. Mohamed, T. Khattab, A. K. Al-Ali, K. A. Harras, and M. Guizani, “Design Challenges of Multi-UAV Systems in Cyber-Physical Applications: A Comprehensive Survey and Future Directions,” IEEE Communications Surveys & Tutorials, Vol.21, No.4, pp. 3340-3385, 2019.
- [8] W. Rawat and Z. Wang, “Deep Convolutional Neural Networks for Image Classification: A Comprehensive Review,” Neural Computation, Vol.29, No.9, pp. 2352-2449, 2017.
- [9] Z.-Q. Zhao, P. Zheng, S.-X. Xu, and X. Wu, “Object Detection with Deep Learning: A Review,” IEEE Trans. on Neural Networks and Learning Systems, Vol.30, No.11, pp. 3212-3232, 2019.
- [10] Y. Shi and M. Mizumoto, “A new approach of neuro-fuzzy learning algorithm for tuning fuzzy rules,” Fuzzy Sets and Systems, Vol.112, Issue 1, pp. 99-116, 2000.
- [11] V-REP simulator, Coppelia Robotics, http://www.coppeliarobotics.com [accessed April 10, 2020]
- [12] S. Horikawa, T. Furuhashi, and Y. Uchikawa, “Composition Methods and Learning Algorithlns of Fuzzy Neural Networks,” J. of Japan Society for Fuzzy Theory and Systems, Vol.4, No.5, pp. 906-928, 1992 (in Japanese).
- [13] T. Shose, Y. Maeda, and Y. Takahashi, “Skill Acquisition and Rule Extraction Method of Expert’s Operation,” Proc. of 2012 IEEE Int. Conf. on Fuzzy Systems (FUZZ-IEEE 2012), pp. 576-581, 2012.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.