Paper:
Improving GNSS Navigation and Control with Electronic Compass in Unmanned System
Xi Han*,**,***, Xiaolin Zhang*, and Yuansheng Liu**,***
*School of Electronics and Information Engineering, Beijing University of Aeronautics and Astronautics
No.37 Xueyuan Road, Haidian District, Beijing 100083, China
**College of Robotics, Beijing Union University
No.97 Beisihuan East Road, Chaoyang District, Beijing 100101, China
***Beijing Engineering Research Center of Smart Mechanical Innovation Design Service, Beijing Union University
No.4 Gongti North Road, Chaoyang District, Beijing 100027, China

This paper proposes a compensation technique for the global navigation satellite system (GNSS)/real-time kinematic (RTK) course angle data using an electronic compass for an unmanned system. Additionally, the proportion, integral, and derivative control based on a back-propagation neural network (BP-PID) is introduced to improve the steering safety and riding comfort. The course angle jitter was determined. Because the GNSS/RTK receiver cannot offer stable heading data under specific conditions, including but not limited to susceptibility to obstacles, complex electromagnetic environment, and fewer satellites. The compensation algorithm is based on the determination of the GNSS course angle variance ratio and the asynchronous characteristic between the GNSS and an electronic compass. The combined data provide accurate and robust navigation information for an outdoor unmanned system. To address the limitation of the in-system parameter adjustment, a back-propagation (BP) neural network is adhibited to a conventional proportion, integral, and derivative (PID) lateral control system. The BP-PID control module updates the incremental PID parameters through self-learning, and results in the smoother operation of the vehicle. The flowchart of the learning algorithm and method of calculating the parameters are presented. A typical measurement was conducted and the obtained results were compared with typical RTK navigation results. Thus, the effectiveness of the proposed compensation method was confirmed.
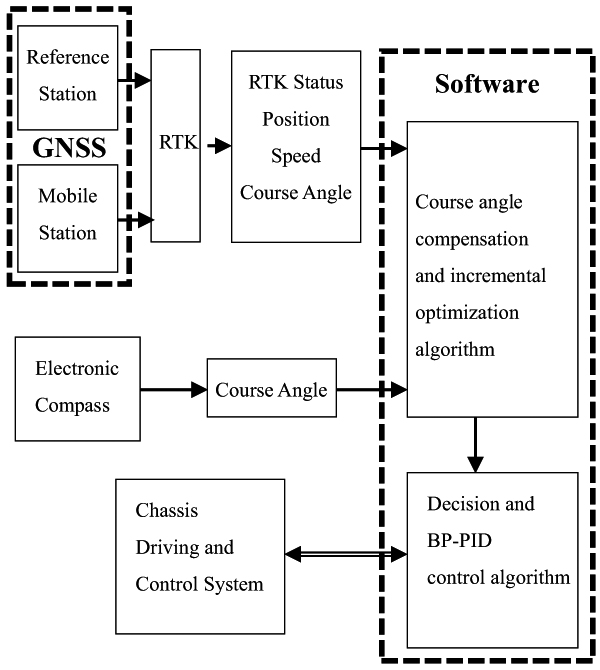
GNSS course angle compensation with EC
- [1] D.-J. Wang, G.-C. Wang, and J. Wu, “Fixed-interval smoothing post-processing algorithm for low-cost MEMS-based integrated navigation system,” J. of Chinese Inertial Technology, Vol.25, No.1, pp. 97-102, 2017 (in Chinese).
- [2] A. G. Quinchia, G. Falco, E. Falletti, F. Dovis, and C. Ferrer, “A Comparison between Different Error Modeling of MEMS Applied to GPS/INS Integrated Systems,” Sensors, Vol.13, Issue 8, pp. 9549-9588, 2013.
- [3] Y. Zhang and D. P. Hong, “Navigation of Mobile Robot Using Low-cost GPS,” Int. J. of Precision Engineering and Manufacturing, Vol.16, Issue 4, pp. 847-850, 2015.
- [4] S. Liu, F.-P. Sun, H.-F. Li, and L.-D. Zhang, “Forward-backward-smoothing algorithm with application to tightly coupled PPP/INS data post-processing,” J. of Chinese Inertial Technology, Vol.23, No.1, pp. 85-91, 2015 (in Chinese).
- [5] E.-H. Shin, “Estimation techniques for low-cost inertial navigation,” Ph.D. thesis, Department of Geomatics Engineering, University of Calgary, 2005.
- [6] H. Liu, S. Nassar, and N. El-Sheimy, “Two-Filter Smoothing for Accurate INS/GPS Land-Vehicle Navigation in Urban Centers,” IEEE Trans. on Vehicular Technology, Vol.59, Issue 9, pp. 4256-4267, 2010.
- [7] W. Hao, F. Sun, and S. Liu, “Fixed-Interval Smoothing Post-Processing Algorithms Based on Tightly Coupled Carrier Phase DGNSS/INS Method,” J. of Geodesy and Geodynamics, Vol.35, No.6, pp. 1031-1035, 2015.
- [8] Y. Bao, H. Zong, and C. Zhang, “The Application of RTS Smooth Filter Algorithm in Post Attitude Determination,” Aerospace Control and Application, Vol.41, No.3, pp. 18-22, 2015.
- [9] B. Huang, Z. Yao, X. Cui, and M. Lu, “Angle-of-Arrival Assisted GNSS Collaborative Positioning,” Sensors, Vol.16, Issue 6, Article No.918, 2016.
- [10] F. Penna, M. A. Caceres, and H. Wymeersch, “Cramér-Rao Bound for Hybrid GNSS-Terrestrial Cooperative Positioning,” IEEE Communications Letter, Vol.14, Issue 11, pp. 1005-1007, 2010.
- [11] B. Huang, Z. Yao, X. Cui, and M. Lu, “Dilution of Precision Analysis for GNSS Collaborative Positioning,” IEEE Trans. on Vehicular Technology, Vol.65, Issue 5, pp. 3401-3415, 2016.
- [12] Y. Li, “A novel ambiguity search algorithm for high accuracy differential GNSS relative positioning,” Aerospace Science and Technology, Vol.78, pp. 418-426, 2018.
- [13] C. Liu, G. Kirchengast, Y. Sun, K. Zhang, R. Norman, M. Schwärz, W. Bai, Q. Du, and Y. Li, “Analysis of ionospheric structure influences on residual ionospheric errors in GNSS radio occultation bending angles based on ray tracing simulations,” Atmospheric Measurement Techniques, Vol.11, Issue 4, pp. 2427-2440, 2018.
- [14] L. Deng, W. Yang, and X. Jin, “Rasterized Polar Coordinate Target Positioning Method,” Infrared Technology, Vol.39, No.3, pp. 279-283, 2017 (in Chinese).
- [15] J. Zurada, “End effector target position learning using feedforward with error back-propagation and recurrent neural networks,” Proc. of IEEE Int. Conf. on Neural Networks, Vol.4, pp. 2633-2638, 1994.
- [16] J. S. Zheng, W. Yang, and S. Xu, ”Attitude Adjustment of Wheeled Robot’s Fixed-Point Motion,” Chinese J. of Electron Devices, Vol.40, No.1, pp. 158-161, 2017 (in Chinese).
- [17] S. K. Jain and J. Chakrawarty, “Thorough Investigation of Artificial Neural Network with Applied Back Propagation Algorithm in Aperture Coupled Microstrip Patch Antenna,” IUP J. of Telecommunications, Vol.9, Issue 4, pp. 52-72, 2017.
- [18] Y. Lu, D. Levy, J. Zhang, and D. Li, “An evolutionary performance-enhanced PSO approach by using a BP neural-learning-based PID controller,” Connection Science, Vol.23, Issue 1, pp. 45-63, 2011.
- [19] X. Yang, G. Xu, Q. Li, Y. Guo, and M. Zhang, “Authorship attribution of source code by using back propagation neural network based on particle swarm optimization,” PLoS ONE, Vol.12, Issue 11, 2017.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.