Paper:
Novel Discriminative Method for Illegal Parking and Abandoned Objects
Xuan Wang†, Huansheng Song, Yong Fang, and Hua Cui
College of Information Engineering, Chang’an University
Xi’an, Shaanxi 710064, China
†Corresponding author

Computer vision techniques have been widely applied in Intelligent Transportation Systems (ITSs) to automatically detect abnormal events and trigger alarms. In the last few years, many abnormal traffic events, such as illegal parking, abandoned objects, speeding, and overloading, have occurred on the highway, threatening traffic safety. In order to distinguish illegal parking and abandoned object events, we propose an effective method to classify these types of abnormal objects. First, abnormal areas are detected by feature point extraction and matching. The transformation relation, between the world and image coordinate systems, is then established by camera calibration. Next, different-height inverse projection planes (IPPs) are built to obtain the inverse projection maps (IPMs). Finally, the 3D information describing the abnormal objects is estimated and used to distinguish illegally parked vehicles and abandoned objects. Experimental results from traffic image sequences show that this method is effective in distinguishing illegal parking and abandoned objects, while its low computational cost satisfies the real-time requirements; furthermore, it can be used in vehicle classification.
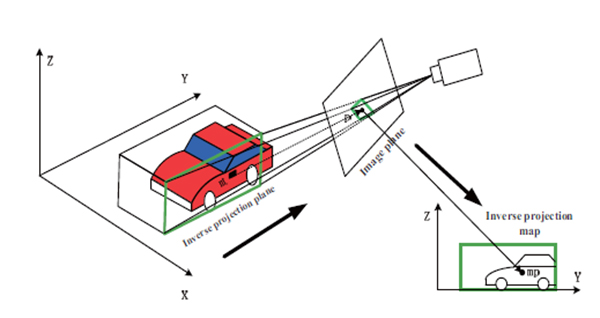
Inverse projection plane and inverse projection maps
- [1] M. Bédard, G. H. Guyatt, M. J. Stones, and J. P. Hirdes, “The independent contribution of driver, crash, and vehicle characteristics to driver fatalities,” Accident analysis and prevention, Vol.34, No.6, pp. 717-727, 2002.
- [2] W. Hu, X. Xiao, D. Xie, and T. Tan, “Traffic accident predictionusing 3-D model-based vehicle tracking,” IEEE Trans. on Vehicular Technology, Vol.53, No.3, pp. 677-694, 2004.
- [3] H. Ikeda, Y. Kaneko, T. Matsuo, and K. Tsuji, “Abnormal incident detection system employing image processing technology,” Proc. of IEEE/IEEJ/JSAI Int. Conf. on Intelligent Transportation Systems, pp. 748-752, 1998.
- [4] Y. K. Ki and D. Y. Lee, “A Traffic Accident Recording and Reporting Model at Intersections,” IEEE Trans. on Intelligent Transportation Systems, Vol.8, No.2, pp. 188-194, 2007.
- [5] J. E. Espinosa, S. A. Velastin, and J. W. Branch, “Vehicle Detection Using Alex Net and Faster R-CNN Deep Learning Models: A Comparative Study,” Int. Visual Informatics Conf., pp. 3-15, 2017.
- [6] D. G. Lowe, “Distinctive Image Features from Scale-Invariant Key-points,” Int. J. of Computer Vision, Vol.60, No.2, pp. 91-110, 2004.
- [7] H. Bay, T. Tuytelaars, and L. V. Gool, “SURF: SpeededUpRobust Features,” 9th European Conf. on Computer Vision (ECCV 2006), 2006.
- [8] E. Rublee, V. Rabaud, K. Konolige, and G. R. Bradski, “ORB: An efficient alternative to SIFT or SURF,” 2011 Int. Conf. on Computer Vision, pp. 2564-2571, 2011.
- [9] P. E. Forssén and D. G. Lowe, “Shape Descriptors for Maximally Stable Extremal Regions,” 2007 IEEE 11th Int. Conf. on Computer Vision, pp. 1-8, 2007.
- [10] S. Leutenegger, M. Chli, and R. Siegwart, “BRISK: Binary Robust invariant scalable keypoints,” 2011 Int. Conf. on Computer Vision, pp. 2548-2555, 2011.
- [11] S. Sivaraman and M. M. Trivedi, “Looking at Vehicles on the Road: A Survey of Vision-Based Vehicle Detection, Tracking, and Behavior Analysis,” IEEE Trans. on Intelligent Transportation Systems, Vol.14, pp. 1773-1795, 2013.
- [12] M. Jayebhaye, “Comparative Analysis and Detection of Street Parked Vehicles using Spatiotemporal Maps and Corner Detection Methods,” Int. J. of Computer Applications, Vol.6, pp. 42-49, 2016.
- [13] T. D’Orazio and C. Guaragnella, “A Survey of Automatic Event Detection in Multi-Camera Third Generation Surveillance Systems,” Int. J. of Pattern Recognition and Artificial Intelligent, Vol.29, No.1, 2015.
- [14] Y. l. Tian, R. S. Feris, H. Liu, A. Hampapur, and M. T. Sun, “Robust Detection of Abandoned and Removed Objects in Complex Surveillance Videos,” IEEE Trans. Systems, Man, and Cybernetics, Part C, Vol.41, pp. 565-576, 2011.
- [15] R. Fraile and S. J. Maybank, “Vehicle Trajectory Approximation and Classification,” British Machine Vision Conf. 1998 (BMVC 1998), 1998.
- [16] A. Bevilacqua and S. Vaccari, “Realtime detection of stopped vehicles in traffic scenes,” IEEE Conf. on Advanced Video and Signal Based Surveillance, pp. 266-270, 2007.
- [17] P. Fatih and H. Tetsuji, “Robust Abandoned Object Detection Using Dual Foregrounds,” Eurasip J. on Advances in Signal Processing, Vol.2008, No.1, pp. 1-11, 2007.
- [18] M. D. Beynon, D. J. V. Hook, M. Seibert, A. Peacock, and D. Dan, “Detecting Abandoned Packages in a Multi-Camera Video Surveillance System,” Proc. of IEEE Conf. on Advanced Video and Signal Based Surveillance, pp. 221-228, 2003.
- [19] D. Wang et al., “Detection and recognition algorithm of illegal parking,” J. of Jilin University (Engineering and Technology Edition), Vol.40, No.1, pp. 42-46, 2010.
- [20] P. F. Alcantarilla, A. Bartoli, and A. J. Davison, “KAZE Features,” European Conf. on Computer Vision (ECCV), pp. 214-227, 2012.
- [21] N. K. Kanhere and S. T. Birchfield, “A Taxonomy and Analysis of Camera Calibration Methods for Traffic Monitoring Applications,” IEEE Trans. on Intelligent Transportation Systems, Vol.11, No.2, pp. 441-452, 2010.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.