Research Paper:
Dense 3D Mapping in Extremely Dark Environments Based on Colored LLAH Descriptor Using Phosphorescent Materials
Shunsei Takarabe and Yonghoon Ji†

Graduate School of Advanced Science and Technology, Japan Advanced Institute of Science and Technology
1-1 Asahidai, Nomi, Ishikawa 923-1292, Japan
†Corresponding author

In this paper, we propose a dense three-dimensional (3D) mapping approach for extremely dark environments based on structure from motion (SfM) and multi-view stereo (MVS) using a general optical camera and phosphorescent materials in extremely dark environments. Conventional methods that use phosphorescent emission as a visual feature suffer from unstable feature correspondence when gradient-based descriptors are used, owing to the temporal decay of the emission intensity. Maintaining uniform brightness requires repeated ultraviolet irradiation, which is impractical in power-limited environments such as lunar caves. To address this issue, we apply locally likely arrangement hashing as a novel framework to find the corresponding feature points for SfM by leveraging the geometric arrangement and luminous color of phosphorescent materials. The experimental results demonstrated that the proposed SfM–MVS framework can construct a geometrically accurate dense 3D map even in extremely dark environments.
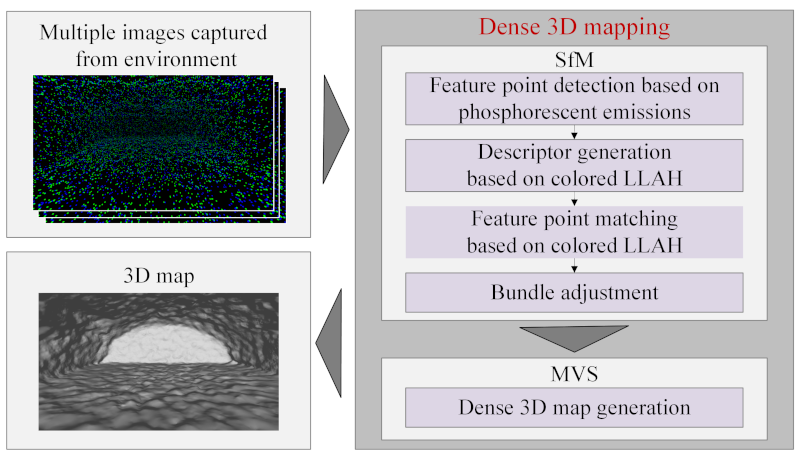
Overview of the proposed framework for dense 3D mapping in extremely dark environments
- [1] A. Cauligi, R. M. Swan, M. Ono, S. Daftry, J. Elliott, L. Matthies, and D. Atha, “ShadowNav: Crater-based localization for nighttime and permanently shadowed region lunar navigation,” Proc. of the 2023 IEEE Aerospace Conf., 2023. https://doi.org/10.1109/AERO55745.2023.10115745
- [2] S. Hong, P. Shyam, A. Bangunharcana, and H. Shin, “Robotic mapping approach under illumination-variant environments at planetary construction sites,” Remote Sensing, Vol.14, No.4, Article No.1027, 2022. https://doi.org/10.3390/rs14041027
- [3] K. MacTavish, M. Paton, and T. D. Barfoot, “Night rider: Visual odometry using headlights,” Proc. of the 2017 Canadian Conf. on Computer and Robot Vision, pp. 314-320, 2017. https://doi.org/10.1109/CRV.2017.48
- [4] P. Nelson, W. Churchill, I. Posner, and P. Newman, “From dusk till dawn: Localisation at night using artificial light sources,” Proc. of the 2015 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 5245-5252, 2015. https://doi.org/10.1109/ICRA.2015.7139930
- [5] D. Lin, N. Yang, Q. Miao, X. Cui, and D. Xu, “True 3D thermal inspection of buildings using multimodal UAV images,” J. of Building Engineering, Vol.100, Article No.111806, 2025. https://doi.org/10.1016/j.jobe.2025.111806
- [6] S. Takarabe and Y. Ji, “Dense 3D mapping based on SfM-MVS using phosphorescent materials in extremely dark environments,” Proc. of the 2025 SICE Festival with Annual Conf. (SICE FES 2025), pp. 1078-1081, 2025. https://doi.org/10.23919/SICEFES67750.2025.11236603
- [7] J. Hölsä, “Persistent luminescence beats the afterglow: 400 years of persistent luminescence,” The Electrochemical Society Interface, Vol.18, No.4, pp. 42-45, 2009.
- [8] D. G. Lowe, “Distinctive image features from scale-invariant keypoints,” Int. J. of Computer Vision, Vol.60, No.2, pp. 91-110, 2004. https://doi.org/10.1023/B:VISI.0000029664.99615.94
- [9] E. Rublee, V. Rabaud, K. Konolige, and G. Bradski, “ORB: An efficient alternative to SIFT or SURF,” Proc. of the 2011 IEEE Int. Conf. on Computer Vision (ICCV 2011), pp. 2564-2571, 2011. https://doi.org/10.1109/ICCV.2011.6126544
- [10] D. DeTone, T. Malisiewicz, and A. Rabinovich, “SuperPoint: Self-supervised interest point detection and description,” Proc. of the 2018 IEEE Conf. on Computer Vision and Pattern Recognition Workshop (CVPRW 2018), 2018. https://doi.org/10.1109/CVPRW.2018.00060
- [11] M. Dusmanu, I. Rocco, T. Pajdla, M. Pollefeys, J. Sivic, A. Torii, and T. Sattler, “D2-Net: A trainable CNN for joint description and detection of local features,” Proc. of the 2019 IEEE Conf. on Computer Vision and Pattern Recognition (CVPR 2019), pp. 8084-8093, 2019. https://doi.org/10.1109/CVPR.2019.00828
- [12] P. Sarlin, D. DeTone, T. Malisiewicz, and A. Rabinovich, “SuperGlue: Learning feature matching with graph neural networks,” Proc. of the 2020 IEEE Conf. on Computer Vision and Pattern Recognition (CVPR 2020), pp. 4937-4946, 2020. https://doi.org/10.1109/CVPR42600.2020.00499
- [13] J. Sun, Z. Shen, Y. Wang, H. Bao, and X. Zhou, “LoFTR: Detector-free local feature matching with Transformers,” Proc. of the 2021 IEEE Conf. on Computer Vision and Pattern Recognition (CVPR 2021), pp. 8918-8927, 2021. https://doi.org/10.1109/CVPR46437.2021.00881
- [14] Z. Tian, P. Qu, J. Li, Y. Sun, G. Li, Z. Liang, and W. Zhang, “A survey of deep learning-based low-light image enhancement,” Sensors, Vol.23, No.18, Article No.7763, 2023. https://doi.org/10.3390/s23187763
- [15] T. Nakai, K. Kise, and M. Iwamura, “Use of affine invariants in locally likely arrangement hashing for camera-based document image retrieval,” Proc. of the 2006 Int. Workshop on Document Analysis Systems (DAS 2006), pp. 541-552, 2006.
- [16] T. Tuytelaars and K. Mikolajczyk, “Local invariant feature detectors: A survey,” Foundations and Trends in Computer Graphics and Vision, Vol.3, No.3, pp. 177-280, 2008. https://doi.org/10.1561/0600000017
- [17] T. Aitasalo, P. Dereń, J. Hölsä, H. Jungner, J.-C. Krupa, M. Lastusaari, J. Legendziewicz, J. Niittykoski, and W. Stręk, “Persistent luminescence phenomena in materials doped with rare earth ions,” J. of Solid State Chemistry, Vol.171, Nos.1-2, pp. 114-122, 2003. https://doi.org/10.1016/S0022-4596(02)00194-9
- [18] M. A. Fischler and R. C. Bolles, “Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography,” Communications of the ACM, Vol.24, No.6, pp. 381-395, 1981. https://doi.org/10.1145/358669.358692
- [19] R. I. Hartley, “In defense of the eight-point algorithm,” IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol.19, No.6, pp. 580-593, 1997. https://doi.org/10.1109/34.601246
- [20] S. Choudhary and P. J. Narayanan, “Visibility probability structure from SfM datasets and applications,” Proc. of the 2012 European Conf. on Computer Vision (ECCV 2012), Lecture Notes in Computer Science, Vol.7576, pp. 130-143, 2012.
- [21] J. L. Schonberger and J. Frahm, “Structure-from-motion revisited,” Proc. of the 2016 IEEE Conf. on Computer Vision and Pattern Recognition (CVPR 2016), pp. 4104-4113, 2016. https://doi.org/10.1109/CVPR.2016.445
- [22] S. Li, X. Xiao, B. Guo, and L. Zhang, “A novel OpenMVS-based texture reconstruction method based on the fully automatic plane segmentation for 3D mesh models,” Remote Sensing, Vol.12, No.23, Article No.3908, 2020. https://doi.org/10.3390/rs12233908
- [23] P. J. Besl and N. D. McKay, “A method for registration of 3-D shapes,” IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol.14, No.2, pp. 239-256, 1992. https://doi.org/10.1109/34.121791
- [24] A. Knapitsch, J. Park, Q.-Y. Zhou, and V. Koltun, “Tanks and temples: Benchmarking large-scale scene reconstruction,” ACM Trans. on Graphics, Vol.36, No.4, Article No.78, 2017. https://doi.org/10.1145/3072959.3073599
- [25] N. El-Sheimy and Y. Li, “Indoor navigation: State of the art and future trends,” Satellite Navigation, Vol.2, Article No.7, 2021. https://doi.org/10.1186/s43020-021-00041-3
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.