Research Paper:
Robust Edge-Weighted Fitting of Articulated Robots and Conveyance Systems to Point Clouds
Kazuha Kumazawa†, Kakeru Takeda, Kota Kawasaki
 , and Hiroshi Masuda
, and Hiroshi Masuda
Graduate School of Informatics and Engineering, The University of Electro-Communications
1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan
†Corresponding author

In automotive factories, articulated robots and conveyance systems require simulation within a high-fidelity virtual environment to ensure collision-free operation. Point clouds captured by terrestrial laser scanners (TLSs) are ideal for creating this “as-is” environment, but they contain both moving and stationary objects. For effective motion planning, the point clouds of moving equipment must be accurately replaced by their kinematic computer-aided design (CAD) models. A major challenge in this registration is the discrepancy between idealized CAD models and real assets. Robots are often outfitted with nonmodeled components like wire harnesses and covers, which act as outliers and degrade standard registration. We propose a robust fitting methodology using edge-weighted registration to address this issue. We hypothesize that geometric edges are structurally consistent between the CAD model and the point cloud, whereas irregular nonmodeled components are less likely to be detected. We introduce a fast edge detection algorithm that leverages the structured nature of TLS point clouds. By assigning higher weights to these stable edges, our method achieves robust alignment even with significant outliers. Our approach uniformly describes link mechanisms using the Unified Robot Description Format (URDF). It accommodates diverse kinematics: for single-chain mechanisms with revolute joints, posture is estimated by fitting links sequentially; for branched-chain mechanisms with prismatic joints, pose is determined by satisfying translational constraints. We evaluated the proposed method using virtual point clouds generated from a simulated scanner. The results show that the edge-weighted registration improves the robustness of pose estimation.
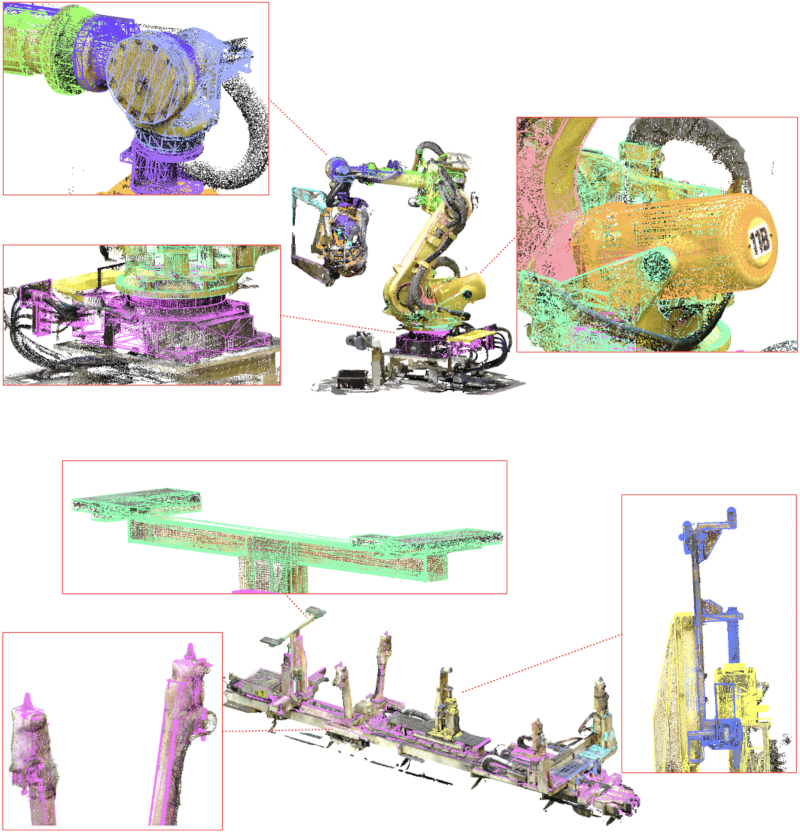
CAD models fitted to factory point clouds
- [1] D. Tola and P. Corke, “Understanding URDF: A survey based on user experience,” 2023 IEEE 19th Int. Conf. Autom. Sci. Eng. (CASE), 2023. https://doi.org/10.1109/CASE56687.2023.10260660
- [2] M. Berger et al., “A survey of surface reconstruction from point clouds,” Comput. Graph. Forum, Vol.36, No.1, pp. 301-329, 2017. https://doi.org/10.1111/cgf.12802
- [3] M. Kazhdan, M. Bolitho, and H. Hoppe, “Poisson surface reconstruction,” Eurogr. Symp. Geom. Process., pp. 61-70, 2006. https://doi.org/10.2312/SGP/SGP06/061-070
- [4] Y. Li et al., “GlobFit: Consistently fitting primitives by discovering global relations,” ACM Trans. Graph., Vol.30, No.4, Article No.52, 2011. https://doi.org/10.1145/2010324.1964947
- [5] R. Schnabel, R. Wahl, and R. Klein, “Efficient RANSAC for point-cloud shape detection,” Comput. Graph. Forum, Vol.26, No.2, pp. 214-226, 2007. https://doi.org/10.1111/j.1467-8659.2007.01016.x
- [6] G. A. Shah, A. Polette, J.-P. Pernot, F. Giannini, and M. Monti, “Simulated annealing-based fitting of CAD models to point clouds of mechanical parts’ assemblies,” Eng. Comput., Vol.37, No.4, pp. 2891-2909, 2021. https://doi.org/10.1007/s00366-020-00970-8
- [7] S. Hu, A. Polette, and J.-P. Pernot, “SMA-Net: Deep learning-based identification and fitting of CAD models from point clouds,” Eng. Comput., Vol.38, No.6, pp. 5467-5488, 2022. https://doi.org/10.1007/s00366-022-01648-z
- [8] K. Kawasaki, K. Takeda, and H. Masuda, “Extraction and reconstruction of articulated robots from point clouds of manufacturing plants,” Comput.-Aided Des. Appl., Vol.22, No.4, pp. 616-628, 2025. https://doi.org/10.14733/cadaps.2025.616-628
- [9] K. S. Arun, T. S. Huang, and S. D. Blostein, “Least-squares fitting of two 3-D point sets,” IEEE Trans. Pattern Anal. Mach. Intell., Vol.PAMI-9, No.5, pp. 698-700, 1987. https://doi.org/10.1109/TPAMI.1987.4767965
- [10] T. Hackel, J. D. Wegner, and K. Schindler, “Contour detection in unstructured 3D point clouds,” 2016 IEEE Conf. Comput. Vis. Pattern Recognit., pp. 1610-1618, 2016. https://doi.org/10.1109/CVPR.2016.178
- [11] M. Pauly, R. Keiser, and M. Gross, “Multi-scale feature extraction on point-sampled surfaces,” Comput. Graph. Forum, Vol.22, No.3, pp. 281-289, 2003. https://doi.org/10.1111/1467-8659.00675
- [12] Y. Ben-Shabat and S. Gould, “DeepFit: 3D surface fitting via neural network weighted least squares,” arXiv:2003.10826, 2020. https://doi.org/10.48550/arXiv.2003.10826
- [13] K. Al-Durgham, A. Habib, and E. Kwak, “RANSAC approach for automated registration of terrestrial laser scans using linear features,” ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci., Vol.II-5/W2, pp. 13-18, 2013. https://doi.org/10.5194/isprsannals-II-5-W2-13-2013
- [14] A. Habib, M. Ghanma, M. Morgan, and R. Al-Ruzouq, “Photogrammetric and lidar data registration using linear features,” Photogramm. Eng. Remote Sens., Vol.71, No.6, pp. 699-707, 2005. https://doi.org/10.14358/PERS.71.6.699
- [15] I. Stamos and M. Leordeanu, “Automated feature-based range registration of urban scenes of large scale,” 2003 IEEE Comput. Soc. Conf. Comput. Vis. Pattern Recognit., Vol.2, pp. II-555-II-561, 2003. https://doi.org/10.1109/CVPR.2003.1211516
- [16] H. Date et al., “Efficient registration of laser-scanned point clouds of bridges using linear features,” Int. J. Automation Technol., Vol.12, No.3, pp. 328-338, 2018. https://doi.org/10.20965/ijat.2018.p0328
- [17] F. Lu and E. Milios, “Globally consistent range scan alignment for environment mapping,” Auton. Robots, Vol.4, No.4, pp. 333-349, 1997. https://doi.org/10.1023/A:1008854305733
- [18] P. E. Nikravesh and H. A. Affifi, “Construction of the equations of motion for multibody dynamics using point and joint coordinates,” M. F. O. Seabra Pereira and J. A. C. Ambrósio (Eds.), “Computer-Aided Analysis of Rigid and Flexible Mechanical Systems,” pp. 31-60, Springer, 1994. https://doi.org/10.1007/978-94-011-1166-9_2
- [19] H. R. Kam, S.-H. Lee, T. Park, and C.-H. Kim, “RViz: A toolkit for real domain data visualization,” Telecommun. Syst., Vol.60, No.2, pp. 337-345, 2015. https://doi.org/10.1007/s11235-015-0034-5
- [20] N. Koenig and A. Howard, “Design and use paradigms for Gazebo, an open-source multi-robot simulator,” 2004 IEEE/RSJ Int. Conf. Intell. Robots Syst., Vol.3, pp. 2149-2154, 2004. https://doi.org/10.1109/IROS.2004.1389727
- [21] H. Masuda and I. Tanaka, “Extraction of surface primitives from noisy large-scale point-clouds,” Comput.-Aided Des. Appl., Vol.6, No.3, pp. 387-398, 2009. https://doi.org/10.3722/cadaps.2009.387-398
- [22] H. Masuda, T. Niwa, I. Tanaka, and R. Matsuoka, “Reconstruction of polygonal faces from large-scale point-clouds of engineering plants,” Comput.-Aided Des. Appl., Vol.12, No.5, pp. 555-563, 2015. https://doi.org/10.1080/16864360.2015.1014733
- [23] A. Chida and H. Masuda, “Reconstruction of polygonal prisms from point-clouds of engineering facilities,” J. Comput. Des. Eng., Vol.3, No.4, pp. 322-329, 2016. https://doi.org/10.1016/j.jcde.2016.05.003
- [24] H. Hoppe, T. DeRose, T. Duchamp, J. McDonald, and W. Stuetzle, “Surface reconstruction from unorganized points,” Proc. 19th Annu. Conf. Comput. Graph. Interact. Tech., Comput.-Aided Des. Appl. (SIGGRAPH), pp. 71-78, 1992. https://doi.org/10.1145/133994.134011
- [25] D. Levin, “Mesh-independent surface interpolation,” G. Brunnett, B. Hamann, H. Müller, and L. Linsen (Eds.), “Geometric Modeling for Scientific Visualization,” pp. 37-49, Springer, 2004. https://doi.org/10.1007/978-3-662-07443-5_3
- [26] M. A. Fischler and R. C. Bolles, “Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography,” Commun. ACM, Vol.24, No.6, pp. 381-395, 1981. https://doi.org/10.1145/358669.358692
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.