Research Paper:
Unknown Input Observer Designs for Polynomial Fuzzy Systems with Uncertainties
Xiang Wang
 , Lizhen Li†
, and Yutang Wu
, Lizhen Li†
, and Yutang Wu
College of Mathematics and Physics, Shanghai University of Electric Power
No.1851 Hucheng Ring Road, Pudong New Area, Shanghai 201306, China
†Corresponding author

This study developed a novel design framework for unknown input observers in uncertain polynomial fuzzy systems using the sum-of-squares algorithm. First, both the system and the input matrices depended on unmeasurable state variables that required estimation. Secondly, the observer structure in this study differed from existing formulations. The proposed observer eliminated uncertainty effects without requiring explicit bounds or auxiliary controllers. The incorporation of slack matrices facilitated the resolution of non-convex terms in the stability conditions, thereby reducing design conservatism. Finally, a simulation study was conducted, and the results confirmed the validity and theoretical value of the developed strategy.
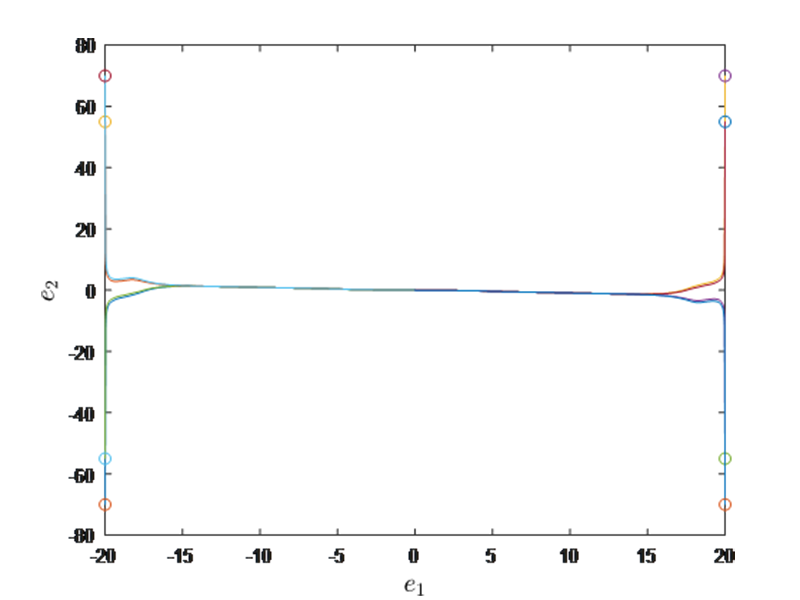
Errors converge globally
- [1] T. Takagi and M. Sugeno, “Fuzzy identification of systems and its applications to modeling and control,” IEEE Trans. on Syst. Man Cybern., Vol.15, No.1, pp. 116-132, 1985. https://doi.org/10.1109/TSMC.1985.6313399
- [2] M. Sugeno and G. T. Kang, “Structure identification of fuzzy model,” Fuzzy Sets Syst., Vol.28, No.1, pp. 15-33, 1988. https://doi.org/10.1016/0165-0114(88)90113-3
- [3] M. Xu, J. Gu, and Z. Xu, “Observer-based switching control for T–S fuzzy systems with mixed time delays,” Int. J. of Fuzzy Systems, Vol.25, No.4, pp. 1480-1494, 2023. https://doi.org/10.1007/s40815-022-01447-0
- [4] B. J. Rhee and S. Won, “A new fuzzy Lyapunov function approach for a Takagi–Sugeno fuzzy control system design,” Fuzzy Sets Syst., Vol.157, No.9, pp. 1211-1228, 2006. https://doi.org/10.1016/j.fss.2005.12.020
- [5] K. Tanaka, H. Yoshida, and H. Ohtake, “A sum-of-squares approach to modeling and control of nonlinear dynamical systems with polynomial fuzzy systems,” IEEE Trans. on Fuzzy Syst., Vol.17, No.4, pp. 911-922, 2009. https://doi.org/10.1109/TFUZZ.2008.924341
- [6] K. Tanaka, H. Ohtake, and H. O. Wang, “Guaranteed cost control of polynomial fuzzy systems via a sum of squares approach,” IEEE Trans. on Syst. Man Cybern., Vol.39, No.2, pp. 561-567, 2009. https://doi.org/10.1109/TSMCB.2008.2006639
- [7] H. K. Lam, M. Narimani, and H. Li, “Stability analysis of polynomial-fuzzy-model-based control systems using switching polynomial Lyapunov function,” IEEE Trans. on Fuzzy Syst., Vol.21, No.5, pp. 800-813, 2013. https://doi.org/10.1109/TFUZZ.2012.2230005
- [8] K. Y. Ye, J. Li, and Y. G. Niu. “Disturbance-observer-based sliding mode control for polynomial fuzzy systems,” Int. J. of Systems Science, pp. 1-5, 2025. https://doi.org/10.1080/00207721.2025.2491780
- [9] B. Pang and Q. Zhang, “Interval observers design for polynomial fuzzy singular systems by utilizing sum-of-squares program,” IEEE Trans. Systs., Man, Cybern., Syst., Vol.50, No.6, pp. 1999-2006, 2020. https://doi.org/10.1109/TSMC.2018.2790975
- [10] D. Pylorof, E. Bakolas, and K. S. Chan, “Design of robust Lyapunov-based observers for nonlinear systems with sum-of-squares programming,” IEEE Control Syst. Letters, Vol.4, No.2, pp. 283-288, 2019. https://doi.org/10.1109/LCSYS.2019.2925511
- [11] H. Han, Y. Sueyama, and C. Chen, “A design of observers of control state and uncertainty via transformation of T-S fuzzy models,” J. Adv. Comput. Intell. Intell. Inform., Vol.22, No.2, pp. 194-202, 2018. https://doi.org/10.20965/jaciii.2018.p0194
- [12] F. Sabbaghian and M. Farrokhi, “Polynomial fuzzy observer-based integrated fault estimation and fault tolerant control with uncertainty and disturbance,” IEEE Trans. Fuzzy Syst., Vol.30, No.3, pp. 741-754, 2020. https://doi.org/10.1109/TFUZZ.2020.3048505
- [13] X. Wang, L. Li, and Y. Wu, “Static output feedback controller design for switching polynomial fuzzy time-varying delay system,” J. Adv. Comput. Intell. Intell. Inform., Vol.28, No.6, pp. 1335-1343, 2024. https://doi.org/10.20965/jaciii.2024.p1335
- [14] V. P. Vu and W. J. Wang, “State and disturbance observer-based controller synthesis for polynomial system,” 2017 Int. Conf. on System Science and Engineering (ICSSE), pp. 66-70, 2017. https://doi.org/10.1109/ICSSE.2017.8030839
- [15] V. P. Vu, W. J. Wang, H. C. Chen, and J. M. Zurada, “Unknown input-based observer synthesis for a polynomial T-S fuzzy model system with uncertainties,” IEEE Trans. Fuzzy Syst., Vol.26, No.3, pp. 1447-1458, 2018. https://doi.org/10.1109/TFUZZ.2017.2724507
- [16] T. Seo, H. Ohtake, K. Tanaka, Y. J. Chen, and H. O. Wang, “A polynomial observer design for a wider class of polynomial fuzzy systems,” 2011 IEEE Int. Conf. on Fuzzy Systems, pp. 1305-1311, 2011. https://doi.org/10.1109/FUZZY.2011.6007342
- [17] K. Tanaka, H. Ohtake, and T. Seo, “Polynomial fuzzy observer designs: A sum-of-squares approach,” IEEE Trans. Syst. Man Cybern. Part B, Vol.42, No.5, pp. 1330-1342, 2012. https://doi.org/10.1109/TSMCB.2012.2190277
- [18] N. Azman, S. Saat, and S. K. Nguang, “Nonlinear observer design with integrator for a class of polynomial discrete-time systems,” 2015 Int. Conf. on Computer, Communications, and Control Technology, pp. 422-426, 2015. https://doi.org/ 10.1109/I4CT.2015.7219611
- [19] Y. Wang, H. Zhang, and J. Zhang, “An SOS-based observer design for discrete-time polynomial fuzzy systems,” Int. J. of Fuzzy Syst., Vol.17, No.1, pp. 94-104, 2015. https://doi.org/10.1007/s40815-015-0003-x
- [20] J. Zhao and H. Han, “A control approach based on observers of state and uncertainty for a class of Takagi–Sugeno fuzzy models,” J. Adv. Comput. Intell. Intell. Inform., Vol.25, No.3, pp. 317-325, 2021. https://doi.org/10.20965/jaciii.2021.p0317
- [21] W. J. Wang, V. P. Vu, and W. Chang, “A synthesis of observer-based controller for stabilizing uncertain T-S fuzzy systems,” J. of Intell. Fuzzy Syst., Vol.30, No.6, pp. 3451-3463. https://doi.org/10.1049/iet-cta.2017.0489
- [22] A. Golabi, M. Beheshti, and M. Asemani, “ H_infty H∞ robust fuzzy dynamic observer-based controller for uncertain Takagi–Sugeno fuzzy systems,” IET Control Theory and Applications, Vol.6, No.10, pp. 1434-1444, 2011 https://doi.org/10.1049/iet-cta.2011.0435
- [23] T. Dang, W. J. Wang, and C. H. Huang, “Observer synthesis for the T-S fuzzy system with uncertainty and output disturbance,” J. of Intell. Fuzzy Syst., Vol.22, No.4, pp. 173-183, 2011. https://doi.org/10.3233/IFS-2011-0474
- [24] V. P. Vu and W. J. Wang, “Observer synthesis for uncertain Takagi–Sugeno fuzzy systems with multiple output matrices,” IET Control Theory and Applications, Vol.10, No.2, pp. 151-161, 2016. https://doi.org/10.1049/iet-cta.2015.0228
- [25] J. S. Yeh, W. Chang, and W. J. Wang, “Unknown input based observer synthesis for uncertain Takagi–Sugeno fuzzy systems,” IET Control Theory and Applications, Vol.9, No.5, pp. 729-735, 2015. https://doi.org/10.1049/iet-cta.2014.0705
- [26] V. P. Vu and W. J. Wang, “Observer design for a discrete-time T-S fuzzy system with uncertainties,” 2015 IEEE Int. Conf. on Automation Science and Engineering, pp. 1262-1267, 2015. https://doi.org/10.1109/CoASE.2015.7294272
- [27] H. S. Kim, J. B. Park, and Y. H. Joo, “Robust stabilization condition for a polynomial fuzzy system with parametric uncertainties,” 2012 12th Int. Conf. on Control, Automation and Systems, pp. 107-111, 2012.
- [28] K. Tanaka, M. Tanaka, Y. J. Chen, and H. O. Wang, “A new sum-of-squares design framework for robust control of polynomial fuzzy systems with uncertainties,” IEEE Trans. Fuzzy Systs., Vol.24, No.1, pp. 94-110, 2016. https://doi.org/10.1109/TFUZZ.2015.2426719
- [29] A. Chibani, M. Chadli, M. M. Belhaouane, and N. B. Braiek, “Polynomial observer design for unknown inputs polynomial fuzzy systems: A sum of squares approach,” IEEE Conf. on Decision and Control, pp. 6788-6793, 2015. https://doi.org/10.1109/CDC.2014.7040455
- [30] A. Chibani, M. Chadli, and N. B. Braiek, “A sum of squares approach for polynomial fuzzy observer design for polynomial fuzzy systems with unknown inputs,” Int. J. of Control Auto. and Syst., Vol.14, No.1, pp. 323-330, 2016. https://doi.org/10.1007/s12555-014-0406-8
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.