Paper:
A Task Allocation Framework for Field-Based Mobile Machines with Algorithm Selection and Hyperparameter Tuning
Kenta Hayakawa*
 , Shunsuke Miyashita**, Nagahiro Fujiwara**, Ryota Yoshiuchi**, Jiaxi Lu***
, Ryota Takamido***
, and Jun Ota***
, Shunsuke Miyashita**, Nagahiro Fujiwara**, Ryota Yoshiuchi**, Jiaxi Lu***
, Ryota Takamido***
, and Jun Ota***
*Department of Precision Engineering, School of Engineering, The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan
**Technology Innovation R&D Department II, Research & Development Headquarters, KUBOTA Corporation
1-11 Takumi-cho, Sakai-ku, Sakai, Osaka 590-0908, Japan
***Research into Artifacts, Center for Engineering (RACE), School of Engineering, The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan

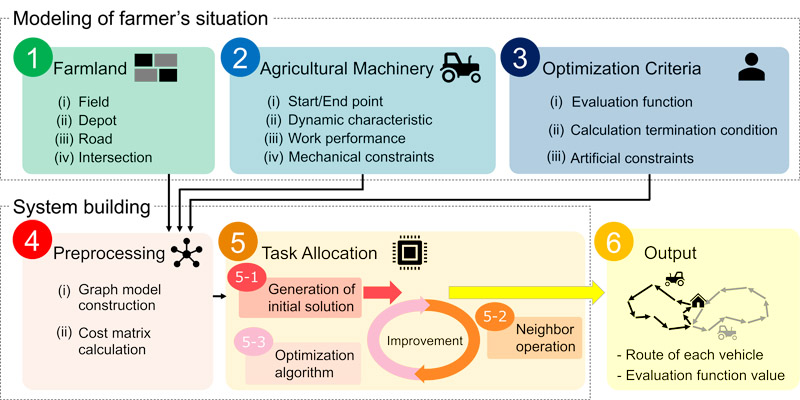
This study proposes a generalizable and extensible framework for task allocation among multiple agricultural machines. Although several previous studies have focused on specific aspects, such as route planning and task scheduling under constrained conditions, few have addressed the combined challenges of task division, variability in farmland scale, and algorithm selection with hyperparameter tuning in an integrated manner. To fill this gap, we formulate the problem as a split delivery vehicle routing problem, which enables flexible division of field tasks across machines. Based on this formulation, we construct a unified framework that incorporates farmland modeling, machine modeling, and farmer-specific preferences. The proposed framework is designed to accommodate multiple optimization algorithms such as simulated annealing, local search, genetic algorithm, and ant colony optimization under a common structure, allowing flexible applications across diverse agricultural scenarios. We evaluated the performance and sensitivity of the algorithm to the hyperparameters using simulations for varying farmland sizes and computation times. The results demonstrate that the framework effectively supports algorithm selection and parameter tuning according to situational needs. This approach offers a versatile foundation for optimizing agricultural tasks, and can be extended to dynamic and real-time environments using real farmland data.
Versatile task allocation framework
- [1] C. Ju, J. Kim, J. Seol, and H. I. Son, “A review on multirobot systems in agriculture,” Computers and Electronics in Agriculture, Vol.202, Article No.107336, 2022. https://doi.org/10.1016/j.compag.2022.107336
- [2] A. Utamima and A. Djunaidy, “Agricultural routing planning: A narrative review of literature,” Procedia Computer Science, Vol.197, pp. 693-700, 2022. https://doi.org/10.1016/j.procs.2021.12.190
- [3] R. Cao, S. Li, Y. Ji, Z. Zhang, H. Xu, M. Zhang, M. Li, and H. Li, “Task assignment of multiple agricultural machinery cooperation based on improved ant colony algorithm,” Computers and Electronics in Agriculture, Vol.182, Article No.105993, 2021. https://doi.org/10.1016/j.compag.2021.105993
- [4] S. Fountas, C. G. Sørensen, Z. Tsiropoulos, C. Cavalaris, V. Liakos, and T. Gemtos, “Farm machinery management information system,” Computers and Electronics in Agriculture, Vol.110, pp. 131-138, 2015. https://doi.org/10.1016/j.compag.2014.11.011
- [5] W. C. T. Chamen, A. P. Moxey, W. Towers, B. Balana, and P. D. Hallett, “Mitigating arable soil compaction: A review and analysis of available cost and benefit data,” Soil and Tillage Research, Vol.146, Part A, pp. 10-25, 2015. https://doi.org/10.1016/j.still.2014.09.011
- [6] A. Utamima and T. Reiners, “Navigating route planning for multiple vehicles in multifield agriculture with a fast hybrid algorithm,” Computers and Electronics in Agriculture, Vol.212, Article No.108021, 2023. https://doi.org/10.1016/j.compag.2023.108021
- [7] M. Umemoto, “Actual conditions of interdistrict and inter-field movements associated with field dispersion: A case study of large-scale rice farming management in western Ibaraki prefecture,” Kanto Tokai J. of Farm Management, Vol.100, pp. 55-58, 2010 (in Japanese).
- [8] M. Dror and P. Trudeau, “Split delivery routing,” Naval Research Logistics, Vol.37, Issue 3, pp. 383-402, 1990. https://doi.org/10.1002/nav.3800370304
- [9] M. Dror, G. Laporte, and P. Trudeau, “Vehicle routing with split deliveries,” Discrete Applied Mathematics, Vol.50, Issue 3, pp. 239-254, 1994. https://doi.org/10.1016/0166-218X(92)00172-I
- [10] D. D. Bochtis and C. G. Sørensen, “The vehicle routing problem in field logistics part I,” Biosystems Engineering, Vol.104, Issue 4, pp. 447-457, 2009. https://doi.org/10.1016/j.biosystemseng.2009.09.003
- [11] J. Conesa-Muñoz, J. M. Bengochea-Guevara, D. Andujar, and A. Ribeiro, “Route planning for agricultural tasks: A general approach for fleets of autonomous vehicles in site-specific herbicide applications,” Computers and Electronics in Agriculture, Vol.127, pp. 204-220, 2016. https://doi.org/10.1016/j.compag.2016.06.012
- [12] H. Seyyedhasani and J. S. Dvorak, “Using the vehicle routing problem to reduce field completion times with multiple machines,” Computers and Electronics in Agriculture, Vol.134, pp. 142-150, 2017. https://doi.org/10.1016/j.compag.2016.11.010
- [13] J. Thomas, “Property rights, land fragmentation and the emerging structure of agriculture in central and eastern European countries,” eJADE Electronic J. of Agricultural and Development Economics, Vol.3, No.2, pp. 225-275, 2006.
- [14] C. Amiama, N. Cascudo, L. Carpente, and A. Cerdeira-Pena, “A decision tool for maize silage harvest operations,” Biosystems Engineering, Vol.134, pp. 94-104, 2015. https://doi.org/10.1016/j.biosystemseng.2015.04.004
- [15] Mitsubishi Research Institute, “Are All Rice Farmers in the Red?,” Food Security and Agriculture, Vol.3, 2023 (in Japanese).
- [16] H. Seyyedhasani and J. S. Dvorak, “Dynamic rerouting of a fleet of vehicles in agricultural operations through a dynamic multiple depot vehicle routing problem representation,” Biosystems Engineering, Vol.171, pp. 63-77, 2018. https://doi.org/10.1016/j.biosystemseng.2018.04.003
- [17] T. Oksanen and A. Visala, “Coverage path planning algorithms for agricultural field machines,” J. of Field Robotics, Vol.26, Issue 8, pp. 651-668, 2009. https://doi.org/10.1002/rob.20300
- [18] I. A. Hameed, D. D. Bochtis, and C. G. Sorensen, “Driving Angle and Track Sequence Optimization for Operational Path Planning Using Genetic Algorithms,” Applied Engineering in Agriculture, Vol.27, No.6, pp. 1077-1086, 2011. https://doi.org/10.13031/2013.40615
- [19] M. Graf Plessen, “Optimal in-field routing for full and partial field coverage with arbitrary non-convex fields and multiple obstacle areas,” Biosystems Engineering, Vol.186, pp. 234-245, 2019. https://doi.org/10.1016/j.biosystemseng.2019.08.001
- [20] C. Gracia, B. Velázquez-Martí, and J. Estornell, “An application of the vehicle routing problem to biomass transportation,” Biosystems Engineering, Vol.124, pp. 40-52, 2014. https://doi.org/10.1016/j.biosystemseng.2014.06.009
- [21] M. Vahdanjoo, K. Zhou, and C. A. G. Sørensen, “Route Planning for Agricultural Machines with Multiple Depots: Manure Application Case Study,” Agronomy, Vol.10, Issue 10, Article No.1608, 2020. https://doi.org/10.3390/agronomy10101608
- [22] T. Yu and H. Zhu, “Hyper-parameter optimization: A review of algorithms and applications,” arXiv preprint, arXiv:2003.05689, 2020. https://doi.org/10.48550/arXiv.2003.05689
- [23] A. E. Ezugwu, A. K. Shukla, R. Nath, A. A. Akinyelu, J. O. Agushaka, H. Chiroma, and P. K. Muhuri, “Metaheuristics: A comprehensive overview and classification along with bibliometric analysis,” Artificial Intelligence Review, Vol.54, pp. 4237-4316, 2021. https://doi.org/10.1007/s10462-020-09952-0
- [24] G. D. Konstantakopoulos, S. P. Gayialis, and E. P. Kechagias, “Vehicle routing problem and related algorithms for logistics distribution: A literature review and classification,” Operational Research, Vol.22, pp. 2033-2062, 2022. https://doi.org/10.1007/s12351-020-00600-7
- [25] S. Kirkpatrick, C. D. Gelatt, Jr., and M. P. Vecchi, “Optimization by Simulated Annealing,” Science, Vol.220, Issue 4598, pp. 671-680, 1983. https://doi.org/10.1126/science.220.4598.671
- [26] J. H. Holland, “Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence,” MIT Press, 1992. https://doi.org/10.7551/mitpress/1090.001.0001
- [27] M. Dorigo, V. Maniezzo, and A. Colorni, “Ant system: optimization by a colony of cooperating agents,” IEEE Trans. on Systems, Man, and Cybernetics, Part B (Cybernetics), Vol.26, Issue 1, pp. 29-41, 1996. https://doi.org/10.1109/3477.484436
- [28] N. M. E. Normasari, V. F. Yu, C. Bachtiyar, and Sukoyo, “A Simulated Annealing Heuristic for the Capacitated Green Vehicle Routing Problem,” Math. Probl. Eng., pp. 1-18, 2019. https://doi.org/10.1155/2019/2358258
- [29] J. Ochelska-Mierzejewska, A. Poniszewska-Marańda, and W. Marańda, “Selected Genetic Algorithms for Vehicle Routing Problem Solving,” Electronics, Vol.10, Issue 24, Article No.3147, 2021. https://doi.org/10.3390/electronics10243147
- [30] Ministry of Agriculture, Forestry and Fisheries, “2020 Census of Agriculture and Forestry in Japan Census Results Report,” 2020.
- [31] R. W. Floyd, “Algorithm 97: Shortest path,” Communications of the ACM, Vol.5, Issue 6, p. 345, 1962. https://doi.org/10.1145/367766.368168
- [32] H. Alibrahim and S. A. Ludwig, “Hyperparameter Optimization: Comparing Genetic Algorithm against Grid Search and Bayesian Optimization,” 2021 IEEE Congress on Evolutionary Computation (CEC), pp. 1551-1559, 2021. https://doi.org/10.1109/CEC45853.2021.9504761
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.