Paper:
Design of Impedance Control and Position Tracking Control for Nonlinear Hydraulic Arms
Kota Kumabe*, Satoru Sakai*
 , Yushiro Hayakawa*, Yanbin Zhang*, and Yoshiyuki Uchikawa**
, Yushiro Hayakawa*, Yanbin Zhang*, and Yoshiyuki Uchikawa**
*Department of Mechanical Engineering, Shinshu University
4-17-1 Wakasato, Nagano, Nagano 380-8553, Japan
**Department of Agricultural and Life Sciences, Shinshu University
8304 Minamiminowa, Kamiina, Nagano 399-4598, Japan

This paper discusses desired disturbance response model + desired reference response model for simultaneously satisfying an impedance control and a position orientation tracking control for nonlinear hydraulic arms. First, we review hydraulic cylinder dynamics with nonlinear pressure dynamics. Second, through the reviewed hydraulic cylinder dynamics and an existing controller design procedure, we discuss two desired models for achieving an impedance control and a position orientation tracking control simultaneously. Finally, the effectiveness of the proposed desired models is confirmed by a preliminary indoor experiment including a simulated open channel.
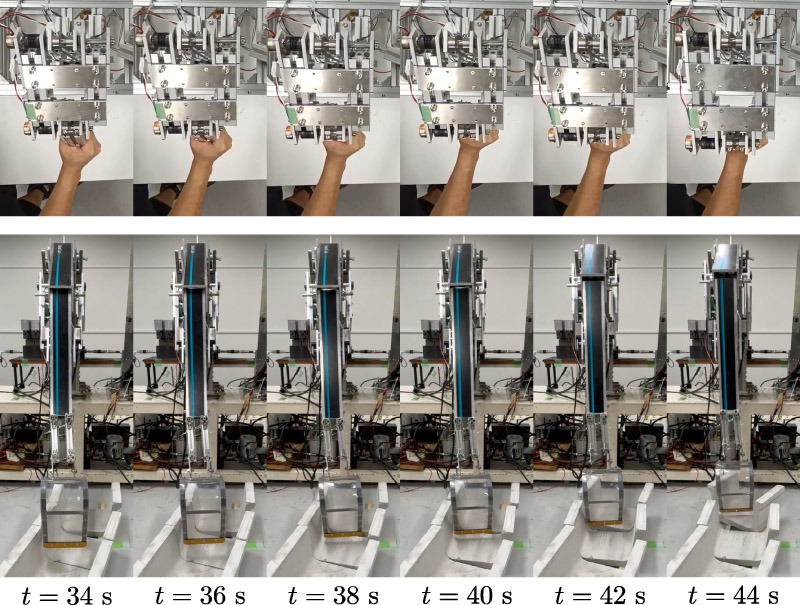
Experiments using a master-follower system (conventional curved section)
- [1] A. D. Terenteva, “PID-control systems on single-bucket excavators during construction work in urban environments,” Int. J. of Mechanical Engineering and Robotics Research, Vol.10, No.5, pp. 224-229, 2021. https://doi.org/10.18178/ijmerr.10.5.224-229
- [2] D. Won and W. Kim, “Disturbance observer based backstepping for position control of electro-hydraulic systems,” Int. J. of Control, Automation and Systems, Vol.13, No.2, pp. 488-493, 2015. https://doi.org/10.1007/s12555-013-0396-y
- [3] T. Noritsugu and M. Takaiwa, “Impedance control of pneumatic servo system using disturbance observer,” Trans. of the Society of Instrument and Control Engineers, Vol.30, No.6, pp. 677-684, 1994 (in Japanese). https://doi.org/10.9746/sicetr1965.30.677
- [4] F. Abry, X. Brun, S. Sesmat, É. Bideaux, and C. Ducat, “Electropneumatic cylinder backstepping position controller design with real-time closed-loop stiffness and damping tuning,” IEEE Trans. on Control Systems Technology, Vol.24, No.2, pp. 541-552, 2016. https://doi.org/10.1109/TCST.2015.2460692
- [5] Q. P. Ha, Q. H. Nguyen, D. C. Rye, and H. F. Durrant-Whyte, “Impedance control of a hydraulically actuated robotic excavator,” Automation in Construction, Vol.9, Nos.5-6, pp. 421-435, 2000. https://doi.org/10.1016/S0926-5805(00)00056-X.
- [6] S. Sakai and S. Stramigioli, “Visualization of hydraulic cylinder dynamics by a structure preserving nondimensionalization,” IEEE/ASME Trans. on Mechatoronics, Vol.23, No.5, pp. 2196-2206, 2018. https://doi.org/10.1109/TMECH.2018.2854751
- [7] J. Mattila, J. Koivumäki, D. G. Caldwell, and C. Semini, “A survey on control of hydraulic robotic manipulators with projection to future trends,” IEEE/ASME Trans. on Mechatronics, Vol.22, No.2, pp. 669-680, 2017. https://doi.org/10.1109/TMECH.2017.2668604
- [8] H. Merritt, “Hydraulic control systems,” John Willey and Sons, 1967.
- [9] Q. Zhang, “Basics of hydraulic systems,” Taylor & Francis, 2008. https://doi.org/10.1201/9781420071023
- [10] S. Sakai, “Fast computation by simplifications of a class of hydro-mechanical systems,” IFAC Proc. Volumes, Vol.45, No.19, pp. 7-12, 2012. https://doi.org/10.3182/20120829-3-IT-4022.00006
- [11] A. van der Schaft and B. M. Maschke, “The Hamiltonian formulation of energy conserving physical systems with external ports,” Archiv für Elektronik und Übertragungstechnik, Vol.49, pp. 362-371, 1995.
- [12] A. van der Schaft, “L2-Gain and Passivity Techniques in Nonlinear Control, 2nd ed.,” Springer, 2017. https://doi.org/10.1007/978-3-319-49992-5
- [13] A. Kugi and W. Kemmetmuller, “New Energy-based Nonlinear Controller for Hydraulic Piston Actuators,” European J. of Control, Vol.10, No.2, pp. 163-173, 2004. https://doi.org/10.3166/ejc.10.163-173
- [14] S. Sakai, M. Obara, and K. Chikazawa, “Parameter identification via nominal integrator of hydraulic cylinder dynamics,” IFAC-PapersOnLine, Vol.54, No.14, pp. 78-83, 2021. https://doi.org/10.1016/j.ifacol.2021.10.332
- [15] S. Sakai, “Further result on the fast computation of a class of hydro-mechanical systems,” Proc. of IFAC Workshop on Lagrangian and Hamiltonian Methods for Nonlinear Control, 2018.
- [16] R. Arai, S. Sakai, and K. Ono, “Response improvement of hydraulic robotic joints via a force servo and inverted pendulum demo,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 761-766, 2024. https://doi.org/10.1109/IROS58592.2024.10802664
- [17] R. Arai and S. Sakai, “Model validation using ready-made components toward flexible hydraulic joints,” J. Robot. Mechatron., Vol.37, No.1, pp. 76-85, 2025. https://doi.org/10.20965/jrm.2025.p0076
- [18] K. Kumabe, S. Sakai, R. Arai, and R. Umemoto, “Master-follower peg-in-hole local experiment using nonlinear hydraulic arms,” Proc. of the JFPS Int. Symposium on Fluid Power, Article No.P1-12, 2024.
- [19] S. Sakai, M.Iida, K. Osuka, and M. Umeda, “Design and control of a heavy material handling manipulator for agricultural robots,” Autonomous Robots, Vol.25, pp. 189-204, 2008. https://doi.org/10.1007/s10514-008-9090-y
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.