Research Paper:
Design of a Robot Arm Based on Human Structure for Humanoid Robots
Keita Kobayashi* and Akinori Sekiguchi**,†

*Sustainable Engineering Program, Graduate School of Engineering, Tokyo University of Technology
1404-1 Katakuramachi, Hachioji, Tokyo 192-0982, Japan
**Department of Mechanical Engineering, Tokyo University of Technology
1404-1 Katakuramachi, Hachioji, Tokyo 192-0982, Japan
†Corresponding author

In this study, we examined the frame model of a robot arm from the upper arm to the forearm based on human anatomy to develop a tendon-driven humanoid robot that incorporates human anatomical structures. We designed a 3D CAD model of a robotic arm incorporating human anatomical features, and evaluated its expected range of motion. The evaluation results demonstrated that incorporating human anatomical features resulted in an expanded range of motion compared to a structure without these features. In particular, the offset of the elbow joint affects the range of motion in flexion and extension of the elbow; it decreases the range of motion for extension but increases it for flexion. Similarly, the curvature of the ulna and radius affects the range of motion in forearm pronation and supination and decreases the range of motion for supination while increasing it for pronation. The prototype was able to perform the basic movements of elbow flexion and extension, as well as forearm pronation and supination; however, the pronation and supination movements were not smooth. Based on these findings, it can be concluded that incorporating human anatomical structures is sufficiently effective in enhancing the functionality of robot arms.
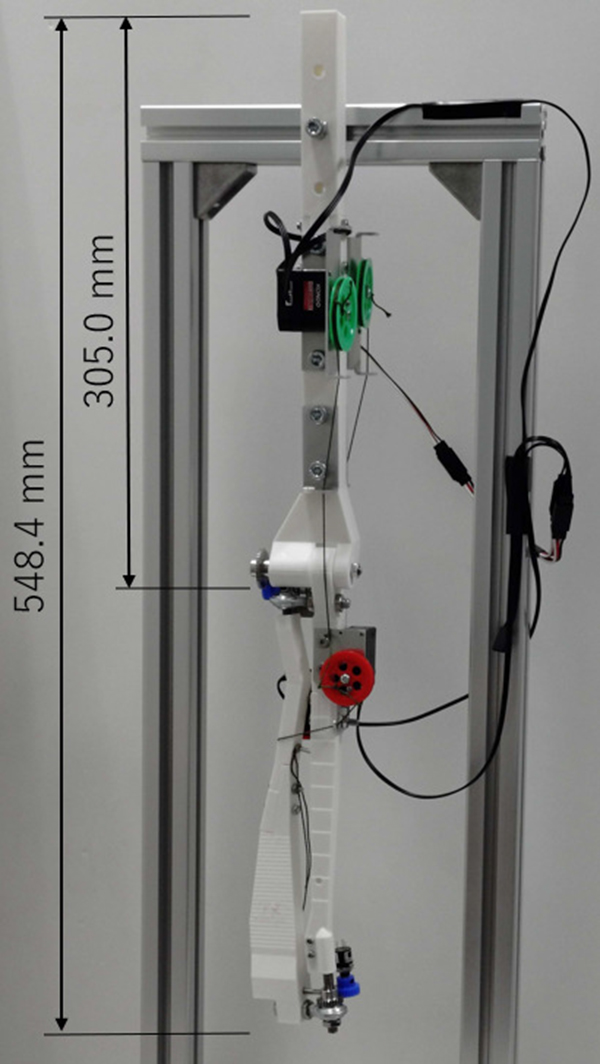
Robot arm based on human structure
- [1] Ministry of Land, Infrastructure, Transport and Tourism (MLIT), “Regarding the recent situation surrounding the construction industry,” (in Japanese). https://www.mlit.go.jp/policy/shingikai/content/001428484.pdf [Accessed December 18, 2023]
- [2] I. Mizuuchi, “Organization and Design of Biologically-Inspired Musculoskeletal Humanoids,” J. of the Robotics Society of Japan, Vol.28, No.6, pp. 689-694, 2010 (in Japanese). https://doi.org/10.7210/jrsj.28.689
- [3] H. Song, Y.-S. Kim, J. Yoon, S.-H. Yun, J. Seo, and Y.-J. Kim, “Development of Low-Inertia High-Stiffness Manipulator LIMS2 for High-Speed Manipulation of Foldable Objects,” Int. Conf. on Intelligent Robots and Systems (IROS), pp. 4145-4151, 2018. https://doi.org/10.1109/IROS.2018.8594005
- [4] A. Ke, J. Huang, and J. He, “An Underactuated Prosthetic Hand with Coupled Metacarpophalangeal Joints,” J. Adv. Comput. Intell. Intell. Inform., Vol.22, No.5, pp. 674-682, 2018. https://doi.org/10.20965/jaciii.2018.p0674
- [5] W. Yu, D. Nishikawa, Y. Ishikawa, H. Yokoi, and Y. Kawazu, “Multifunctional Electrical Prosthetic Hand – Development of Tendon-driven Mechanism and Controller –,” J. Robot. Mechatron., Vol.14, No.6, pp. 557-564, 2002. https://doi.org/10.20965/jrm.2002.p0557
- [6] K. Kawaharazuka, S. Makino, M. Kawamura, S. Nakashima, Y. Asano, K. Okada, and M. Inaba, “Human Mimetic Forearm and Hand Design with a Radioulnar Joint and Flexible Machined Spring Finger for Human Skillful Motions,” J. Robot. Mechatron., Vol.32, No.2, pp. 445-458, 2020. https://doi.org/10.20965/jrm.2020.p0445
- [7] Y. Asano, T. Kozuki, S. Ookubo, M. Kawamura, S. Nakashima, T. Katayama, I. Yanokura, T. Hirose, K. Kawaharazuka, S. Makino, Y. Kakiuchi, K. Okada, and M. Inaba, “Human Mimetic Musculoskeletal Humanoid Kengoro toward Real World Physically Interactive Actions,” Int. Conf. on Humanoid Robots (Humanoids), pp. 876-883, 2016. https://doi.org/10.1109/HUMANOIDS.2016.7803376
- [8] M. Raibert, K. Blankespoor, G. Nelson, R. Playter, and the BigDog Team, “BigDog, the Rough-Terrain Quadruped Robot,” Proc. of the 17th World Congress: The Int. Federation of Automatic Control, pp. 10822-10825, 2008. https://doi.org/10.3182/20080706-5-KR-1001.01833
- [9] A. I. Kapandji, “Anatomie Fonctionnelle,” pp. 90-145, Vigot-Maloine, 2019.
- [10] A. Al-Ibadi, S. Nefti-Meziani, and S. Davis, “A Robot Continuum Arm Inspired by the Human Upper Limb: The Pronation and Supination Rotating Behaviour,” Proc. of the 2nd Int. Conf. on Electrical, Communication, and Computer Engineering (ICECCE), 2020. https://doi.org/10.1109/ICECCE49384.2020.9179338
- [11] P. E. Sandin, “Robot Mechanisms And Mechanical Devices Illustrated,” p. 245, McGraw Hill, 2003.
- [12] B. M. Gammon, “Arthrokinematics of the Distal Radioulnar Joint in the Normal Wrist and Following Distal Radius Malunion,” Electronic Thesis and Dissertation Repository, pp. 1-36, 2016.
- [13] R. P. van Riet, F. Van Glabbeek, P. G. Neale, R. Bimmel, H. Bortier, B. F. Morrey, S. W. O’Driscoll, and K. N. An, “Anatomical Considerations of the Radius,” Clinical Anatomy, Vol.17, No.7, pp. 564-569, 2004. https://doi.org/10.1002/ca.10256
- [14] M. A. Khan, H. Gul, and S. M. Nizami, “Determination of Gender from Various Measurements of the Humerus,” Cureus, Vol.12, No.1, Article No.e6598, 2020. https://doi.org/10.7759/cureus.6598
- [15] J. R. Brownhill, G. J. W. King, and J. A. Johnson, “Morphologic analysis of the distal humerus with special interest in elbow implant sizing and alignment,” J. of Shoulder and Elbow Surgery, Vol.16, No.3, Supplement, pp. S126-S132, 2007. https://doi.org/10.1016/j.jse.2006.01.018
- [16] A. Adikrishna, J. Y. Kim, A. L. Kekatpure, H.-J. Lee, M. Kim, and I.-H. Jeon, “Dorsal apex curve of the proximal ulna,” Acta Orthopaedica et Traumatologica Turcica, Vol.50, No.1, pp. 97-102, 2016. https://doi.org/10.3944/AOTT.2016.15.0146
- [17] D. Polimanti and G. Giannicola, “Anatomy of the Elbow and How It Affects Implant Design,” F. Castoldi, G. Giannicola, and R. Rotini (Eds.), “Elbow Arthroplasty,” pp. 23-36, 2020. https://doi.org/10.1007/978-3-030-14455-5_3
- [18] Z. Xu, “Design and Control of an Anthropomorphic Robotic Hand: Learning Advantages From the Human Body & Brain,” 2015.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.