Paper:
Dressing Assistance Method for Long-Sleeved Shirts Using End-to-End Motion Prediction
Yutaka Takase*
 , Keisuke Onda**, and Kimitoshi Yamazaki***
, Keisuke Onda**, and Kimitoshi Yamazaki***
*Faculty of Engineering, Shinshu University
4-17-1 Wakasato, Nagano, Nagano 380-8553, Japan
**Department of Engineering, Shinshu University
4-17-1 Wakasato, Nagano, Nagano 380-8553, Japan
***Department of Robotics, Graduate School of Engineering, Tohoku University
6-6-01 Aoba, Aramaki, Aoba-ku, Sendai, Miyagi 980-8579, Japan

This study presents a novel method for helping hemiplegic patients put on a long-sleeved shirt. Our analysis specifically focuses on the behaviors of patients with hemiplegia in the latter half of the dressing phase, which involves moving the garment to the healthy side after dressing the paralyzed side. We propose a novel method to assist this movement. A key aspect of the proposed method is the inclusion of a module capable of predicting the target position of a robot’s end effector using time-series depth images. By combining this module with force-based control, a single-armed robot helps a wearer manipulate their garment according to their movements. Experiments utilizing an articulated manipulator demonstrate the effectiveness of the proposed method.
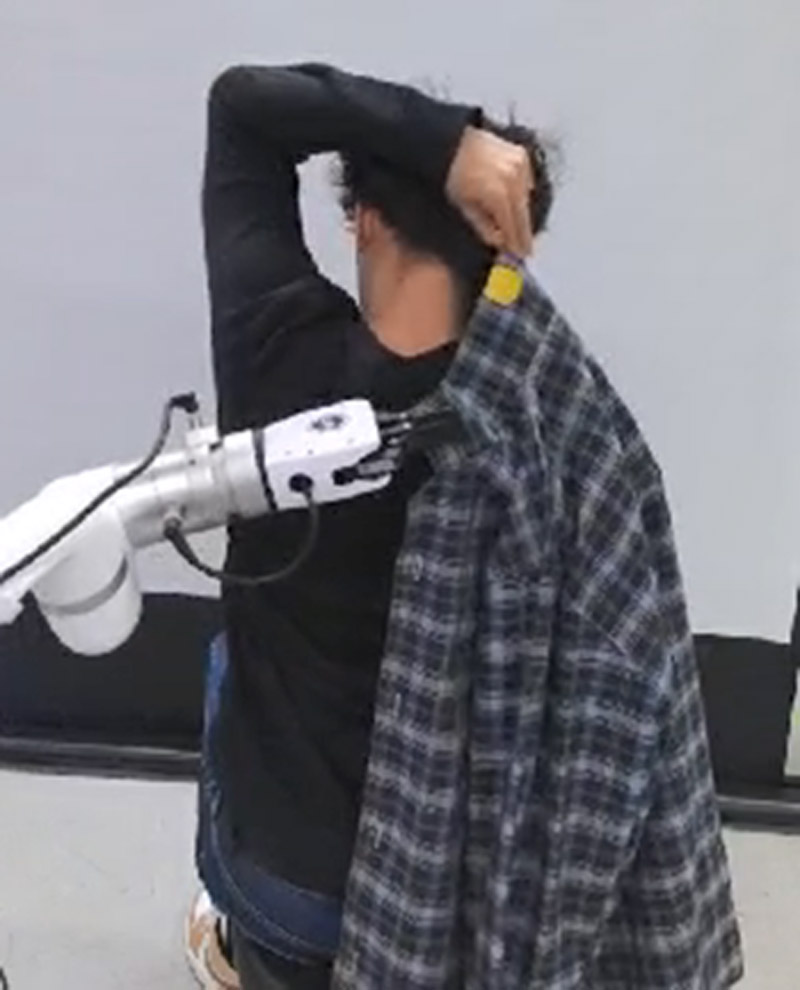
Dressing assistance with prediction
- [1] A. Bandura, “Self-efficacy: Toward a unifying theory of behavioral change,” Psychological Review, Vol.84, No.2, pp. 191-215, 1977. https://doi.org/10.1037/0033-295X.84.2.191
- [2] Z. Erickson, H. M. Clever, G. Turk, C. K. Liu, and C. C. Kemp, “Deep haptic model predictive control for robot-assisted dressing,” 2018 IEEE Int. Conf. on Robotics and Automation, pp. 4437-4444, 2018. https://doi.org/10.1109/ICRA.2018.8460656
- [3] K. Yamazaki, R. Oya, K. Nagahama, K. Okada, and M. Inaba, “Bottom dressing by a dual-arm robot using a clothing state estimation based on dynamic shape changes,” Int. J. of Advanced Robotic Systems, Vol.13, No.1, 2016. https://doi.org/10.5772/61930
- [4] N. Koganti, T. Shibata, T. Tamei, and K. Ikeda, “Data-efficient learning of robotic clothing assistance using Bayesian Gaussian process latent variable model,” Advanced Robotics, Vol.33, Nos.15-16, pp. 800-814, 2019. https://doi.org/10.1080/01691864.2019.1610061
- [5] T. Yamazaki, Y. Takase, and K. Yamazaki, “A robot system for assisting humans in wearing long-sleeved shirt,” 2022 IEEE Int. Conf. on Mechatronics and Automation, pp. 657-663, 2022. https://doi.org/10.1109/ICMA54519.2022.9855952
- [6] T. Tamei, T. Matsubara, A. Rai, and T. Shibata, “Reinforcement learning of clothing assistance with a dual-arm robot,” 11th IEEE-RAS Int. Conf. on Humanoid Robots, pp. 733-738, 2011. https://doi.org/10.1109/Humanoids.2011.6100915
- [7] E. Pignat and S. Calinon, “Learning adaptive dressing assistance from human demonstration,” Robotics and Autonomous Systems, Vol.93, pp. 61-75, 2017. https://doi.org/10.1016/j.robot.2017.03.017
- [8] A. Kapusta et al., “Personalized collaborative plans for robot-assisted dressing via optimization and simulation,” Autonomous Robots, Vol.43, No.8, pp. 2183-2207, 2019. https://doi.org/10.1007/s10514-019-09865-0
- [9] L. Twardon and H. Ritter, “Active boundary component models for robotic dressing assistance,” 2016 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2811-2818, 2016. https://doi.org/10.1109/IROS.2016.7759436
- [10] Y. Gao, H. J. Chang, and Y. Demiris, “User modelling for personalised dressing assistance by humanoid robots,” 2015 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1840-1845, 2015.
- [11] A. Clegg et al., “Learning to collaborate from simulation for robot-assisted dressing,” IEEE Robotics and Automation Letters, Vol.5, No.2, pp. 2746-2753, 2020. https://doi.org/10.1109/LRA.2020.2972852
- [12] R. P. Joshi, N. Koganti, and T. Shibata, “A framework for robotic clothing assistance by imitation learning,” Advanced Robotics, Vol.33, No.22, pp. 1156-1174, 2019. https://doi.org/10.1080/01691864.2019.1636715
- [13] F. Zhang, A. Cully, and Y. Demiris, “Personalized robot-assisted dressing using user modeling in latent spaces,” 2017 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3603-3610, 2017. https://doi.org/10.1109/IROS.2017.8206206
- [14] F. Zhang and Y. Demiris, “Learning grasping points for garment manipulation in robot-assisted dressing,” 2020 IEEE Int. Conf. on Robotics and Automation, pp. 9114-9120, 2020. https://doi.org/10.1109/ICRA40945.2020.9196994
- [15] S. Li, N. Figueroa, A. Shah, and J. A. Shah, “Provably safe and efficient motion planning with uncertain human dynamics,” Robotics: Science and Systems XVII, 2021. https://doi.org/10.15607/RSS.2021.XVII.050
- [16] T. Fujiki and K. Tahara, “Experimental verification of series admittance impedance control,” J. of the Robotics Society of Japan, Vol.40, No.4, pp. 355-358, 2022 (in Japanese). https://doi.org/10.7210/jrsj.40.355
- [17] D. P. Kingma and J. Ba, “Adam: A method for stochastic optimization,” 3rd Int. Conf. for Learning Representations, 2014. https://arxiv.org/abs/1412.6980
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.