Letter:
Dynamic Friction Characterization of a Linear Servo Motor Using an Optimal Sinusoidal Reference Tracking Controller
Danial Waleed, Hafiz M. Usman, and Rached Dhaouadi
American University of Sharjah
P.O. Box 26666 Sharjah, United Arab Emirates

This letter presents the design of an optimal sinusoidal tracking and disturbance rejection controller for a linear voice-coil motor. The optimal tracking and disturbance rejection system is used to characterize the nonlinear dynamic friction of the servo motor. The control scheme allows investigating the hysteresis characteristics of friction as a function of frequency. Experimental results indicate the effectiveness of the proposed identification procedure for the dynamic friction estimation.
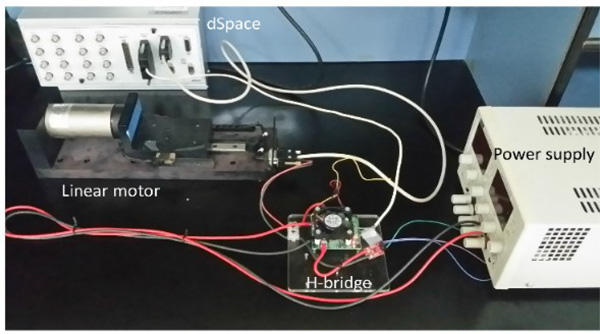
Hardware setup for friction estimation
- [1] R. Hao et al., “Observer-Based Robust Control of 6-DOF Parallel Electrical Manipulator with Fast Friction Estimation,” IEEE Trans. on Automation Science and Engineering, Vol.13, pp. 1399-1408, 2016.
- [2] M. Takrouri and R. Dhaouadi, “ADALINE-Based Friction Identification of a Linear Voice Coil DC Motor,” IEEE American Control Conf. (ACC), pp. 3062-3068, 2016.
- [3] Y. Zhu, X. Zhu, T. Izumi, and M. Kanesaka, “Optimal Velocity Function Minimizing Dissipated Energy Considering All Friction in a Position Control System,” J. Robot. Mechatron, Vol.19, No.1, pp. 97-105, 2007.
- [4] R. Dhaouadi, “Torque Control in Harmonic Drives with Nonlinear Dynamic Friction Compensation,” J. Robot. Mechatron, Vol.16, No.4, pp. 388-396, 2004.
- [5] V. F. Montagner and S. P. Ribas, “Design of a Controller for Tracking Sinusoidal References with Robustness to Load Disturbances,” IEEE Power Electronics Conf., pp. 1239-1243, 2009.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.