Paper:
Needle Tip Position Accuracy Evaluation Experiment for Puncture Robot in Remote Center Control
Kohei Sugiyama*1, Takayuki Matsuno*1, Tetsushi Kamegawa*1, Takao Hiraki*2, Hirotaka Nakaya*1, Masayuki Nakamura*3, Akira Yanou*4, and Mamoru Minami*1
*1Graduate School of Natural Science and Technology, Okayama University
3-1-1 Tsushimanaka, Kita-ku, Okayama city, Okayama 700-8530, Japan
*2Department of Radiology, Okayama University Hospital
2-5-1 Shikata, Kita-ku, Okayama city, Okayama 700-8558, Japan
*3Department of Mechanical Systems Engineering, Okayama University
3-1-1 Tsushimanaka, Kita-ku, Okayama city, Okayama 700-8530, Japan
*4Department of Radiological Technology, Kawasaki College of Allied Health Professions
316 Matsushima, Kurashiki, Okayama 701-0194, Japan

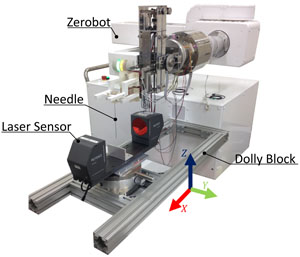
Location of devices in the experiment
- [1] T. Hiraki, T. Kamegawa, T. Matsuno, and S. Kanazawa, “Development of a Robot for CT Fluoroscopy-guided Intervention: Free Physicians from Radiation,” Jon J. Intervent. Radiol., Vol.20, pp. 375-381, 2014.
- [2] T. Hiraki, H. Gobara, H. Mimura, S. Toyooka, H. Fujiwara, K. Yasui, Y. Sano, T. Iguchi, J. Sakurai, N. Tajiri, T. Mukai, Y. Matsui, and S. Kanazawa, “Radiofrequency Ablation of Lung Cancer at Okayama University Hospital: A Review of 10 Years of Experience,” Acta. Med., Vol.65, No.5, pp. 287-297, Okayama, 2011.
- [3] D. Staianovici, K. Cleary, A. Patriciu, D. Mazilu, A. Stanimir, N. Craciunoiu, V. Watson, and L. Kavoussi, “AcuBot: A Robot for Radiological Interventions,” IEEE Trans. on Robotics and Automation, Vol.19, No.5, pp. 927-930, October 2003.
- [4] B. Maurin, B. Bayle, O. Piccin, J. Gangloff, M. Mathelin, C. Doignon, P. Zanne, and A. Gangi, “A Patient-Mounted Robotic Platform for CT-Scan Guided Procedures,” IEEE Trans. on Biomedical Engineering, Vol.55, No.10, October 2008.
- [5] Y. Koethe, S. Xu, G. Velusamy, B. J. Wood, and A. M. Venkatesan, “Accuracy and efficacy of percutaneous biopsy and ablation using robotic assistance under computed tomography guidance: a phantom study,” European Radiology, Vol.24, Issue 3, pp. 723-730, March 2013.
- [6] S. Ikeda, C. T. Villagran, T. Fukuda, Y. Okada, F. Arai, M. Negoro, M. Hayakawa, and I. Takahashi, “Patient-Specific IVR Endovascular Simulator with Augmented Reality for Medical Training and Robot Evaluation,” J. of Robotics and Mechatronics, Vol.20, No.3, 2008.
- [7] Y. Kobayashi, J. Okamoto, and M. G. Fujie, “Position Control of Needle Tip Based on Physical Properties of Liver and Force Sensor,” J. of Robotics and Mechatronics, Vol.18, No.2, pp. 167-176, 2006.
- [8] H. Nakaya, T. Matsuno, T. Kamegawa, T. Hiraki, T. Inoue, A. Yanou, M. Minami, and A. Gofuku, “CT Phantom for Development of Robotic Interventional Radiology,” IEEE/SICE Int. Symposium on System Integration, Chuo University, Tokyo, Japan, December 13-15, 2014.
- [9] K. Sugiyama, T. Matsuno, T. Kamegawa, T. Hiraki, H. Nakaya, A. Yanou, and M. Minami, “Reaction Force Analysis of Puncture Robot for CT-guided Interventional Radiology in Animal Experiment,” IEEE/SICE Int. Symposium on System Integration (SII), Nagoya, Japan, December 11-13, 2015.
- [10] J. J. Craig, “Introduction to ROBOTICS – mechanics and control,” Addison-Wesley, 1989.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.