Paper:
Investigation of Human Environmental Recognition During Walking Using VR and its Application to Autonomous Driving of Mobile Robots
Yamato Sato*, Haruki Ishii*, Tomokazu Takahashi*, Masato Suzuki*
 , Kazuyo Tsuzuki**
, Yasushi Mae*, and Seiji Aoyagi*,†
, Kazuyo Tsuzuki**
, Yasushi Mae*, and Seiji Aoyagi*,†
*Department of Mechanical Engineering, Faculty of Engineering Science, Kansai University
3-3-35 Yamate-cho, Suita, Osaka 564-8680, Japan
†Corresponding author
**Department of Architecture, Faculty of Environmental and Urban Engineering, Kansai University
3-3-35 Yamate-cho, Suita, Osaka 564-8680, Japan

Teams participating in robot competitions commonly use LiDAR-SLAM for robot navigation. However, when there are significant differences between the pre-created point cloud map of the environment and the point cloud data obtained during autonomous driving, or in open environments where acquiring point cloud data is difficult, the robot may lose its self-position and often fail in autonomous driving. Humans can reach their destinations even in unfamiliar environments by relying primarily on visual cues along with guidance information such as maps and signs. It can be said that humans rely on visual information when navigating. Similarly, if robots navigate using visual information like humans, it may become possible to achieve autonomous driving without requiring pre-acquired dense point cloud maps. In this paper, we investigated how humans walk and what they focus on while walking, both in real world and when remotely controlling a robot using VR (including cases where surrounding information other than the road was removed). The results indicated that if the recognition of the road is possible, it may be feasible to complete a course without a pre-existing map. Based on these findings, we developed a simple navigation system using road recognition using vanishing points. Its effectiveness was confirmed through driving experiments conducted on a university campus.
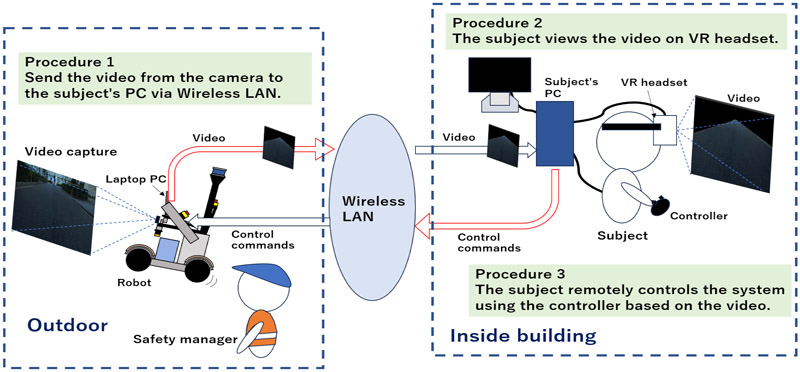
VR system for human-inspired navigation
- [1] W. Hess, D. Kohler, H. Rapp, and D. Andor, “Real-time loop closure in 2D LIDAR SLAM,” 2016 IEEE Int. Conf. on Robotics and Automation (ICRA), 2016. https://doi.org/10.1109/ICRA.2016.7487258
- [2] K. Charalampous, I. Kostavelis, D. Chrysostomou et al., “3D maps registration and path planning for autonomous robot navigation,” arXiv preprint, arXiv:1312.2822, 2013. https://doi.org/10.48550/arXiv.1312.2822
- [3] S. Niijima, Y. Sasaki, and H. Mizoguchi, “Real-time autonomous navigation of an electric wheelchair in large-scale urban area with 3D map,” Advanced Robotics, Vol.33, Issue 19, pp. 1006-1018, 2019. https://doi.org/10.1080/01691864.2019.1642240
- [4] H. Katoh, “Origin and future of the theory that humans have obtained 80% of information input from vision,” Tsukuba University of Technology Techno Report, Vol.25, No.1, pp. 95-100, 2017 (in Japanese).
- [5] M. Okutomi, S. Noguchi, and K. Nakano, “Road-region detection by computing homography matrix using stereo images,” J. of the Robotics Society of Japan, Vol.18, No.8, pp. 1105-1111, 2000 (in Japanese).
- [6] M. Okutomi, K. Nakano, J. Maruyama, and T. Hara, “Continuous estimation of planar region for visual navigation using sequential stereo images,” IPSJ J., Vol.43, No.4, pp. 1061-1069, 2002 (in Japanese).
- [7] M. Kudo and H. Takahashi, “Street gutter region extraction using projective geometric features,” ITE Technical Report, Vol.41, No.12, Session ID: AIT2017-50, 2017 (in Japanese). https://doi.org/10.11485/itetr.41.12.0_21
- [8] K. Tanaka and M. Okutomi, “Detection of straight lines in road scenes using stereo images,” IEICE Trans. on Information and Systems, Vol.89-D, No.8, pp. 1892-1896, 2006 (in Japanese).
- [9] E. Adachi, T. Nabeshima, and T. Kurita, “Lane detection by Hough transform that considers posture of car,” IEICE Technical Report, Vol.105, No.615, Session ID: PRMU2005-219, pp. 103-107, 2006 (in Japanese).
- [10] M. Uebayashi, Y. Onishi, M. Manabe, T. Taoka, and M. Fukui, “Development of a white line recognition system for automotive camera video,” Proc. of the 69th National Convention of IPSJ, pp. 67-68, 2007 (in Japanese).
- [11] E. Panfilova, O. S. Shipitko, and I. Kunina, “Fast Hough transform-based road markings detection for autonomous vehicle,” Thirteenth Int. Conf. on Machine Vision, 2020. https://doi.org/10.1117/12.2587615
- [12] S. Ishikawa, Y. Kobayashi, T. Kaneko, A. Yamashita, and S. Ishihara, “Study on viewpoint change image generation from in-vehicle camera images,” ITE Technical Report, Vol.37, No.36, Session ID: ME2013-88, 2013. https://doi.org/10.11485/itetr.37.36.0_15
- [13] N. Chen, S. Suga, M. Suzuki, T. Takahashi, Y. Mae, Y. Arai, and S. Aoyagi, “Proposal for navigation system using three-dimensional maps—self-localization using a 3D map and slope detection using a 2D laser range finder and 3D map,” J. Robot. Mechatron., Vol.35, No.6, pp. 1604-1614, 2023. https://doi.org/10.20965/jrm.2023.p1604
- [14] J. Xue, N. Chen, T. Takahashi, M. Suzuki, Y. Mae, Y. Arai, and S. Aoyagi, “Proposal of a navigation system using a 3D maps – Development of a navigation system that integrates self-position estimation using 3D maps and route planning using 2D maps –,” Proc. of JSME Annual Conf. on Robotics and Mechatronics (Robomec2022), Session ID: 2P1-I11, 2022. https://doi.org/10.1299/jsmermd.2022.2P1-I11
- [15] H. Nakamura, Y. Nomura, and S. Yamamoto, “Autonomous traveling of a mobile robot with significant point images – Experiment on recognition of a traveling path –,” Proc. of the 53rd Japan Joint Automatic Control Conf., Session ID: 573, 2010. https://doi.org/10.11511/jacc.53.0.278.0
- [16] “Tsukuba Challenge 2024.” https://tsukubachallenge.jp/2024/ [Accessed January 3, 2025]
- [17] “Nakanoshima Robot Challenge 2024.” https://www.nakanoshima-rc.jp/2024/nakanoshima2024.html [Accessed January 3, 2025]
- [18] National Police Agency, “Guidelines for Public Road Demonstration Experiments of Sidewalk-Driving Robots.” https://www.npa.go.jp/bureau/traffic/selfdriving/roadtesting/202307robot_shiryou.pdf [Accessed October 5, 2025]
- [19] ROS. http://wiki.ros.org/ja [Accessed January 3, 2025]
- [20] Master_API. https://wiki.ros.org/ROS/Master_API [Accessed January 3, 2025]
- [21] Slave_API. https://wiki.ros.org/ROS/Slave_API [Accessed January 3, 2025]
- [22] Using the Video API. https://www.stereolabs.com/docs/video/using-video [Accessed January 3, 2025]
- [23] Image Filtering. https://docs.opencv.org/4.x/d4/d86/group__imgproc__filter.html#ga27c049795ce870216ddfb366086b5a04 [Accessed January 3, 2025]
- [24] Edge detection (SobelLaplacian, Canny). http://opencv.jp/opencv2-x-samples/edge_detection/ [Accessed January 3, 2025]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.