Paper:
Spontaneous Rhythmic Behavior Generation in Robot Locomotion Based on Mechanical Stabilization
Kai Ito, Keita Sato, and Yusuke Ikemoto

Department of Mechanical Engineering, Faculty of Science and Technology, Meijo University
1-501 Shiogamaguchi, Tempaku-ku, Nagoya, Aichi 486-8502, Japan

Animals exhibit a variety of gait patterns that vary with locomotor speed and energy efficiency. Although a variety of gait patterns have been studied, the mechanism of gait generation has remained vague. In this study, we performed ground reaction force equalization for stable locomotion by developing a one-input, two-output leg-equipped robot with a differential gear. The developed robot can tolerate angular velocity differences and equalize the torque transmitted to the legs. To investigate the possibility of rhythm generation based on ground reaction force equalization, hardware experiments and mathematical analysis were conducted using a nonlinear system. The robot experiments and theoretical analysis show that the robot can spontaneously generate rhythm by equalizing the ground reaction force.
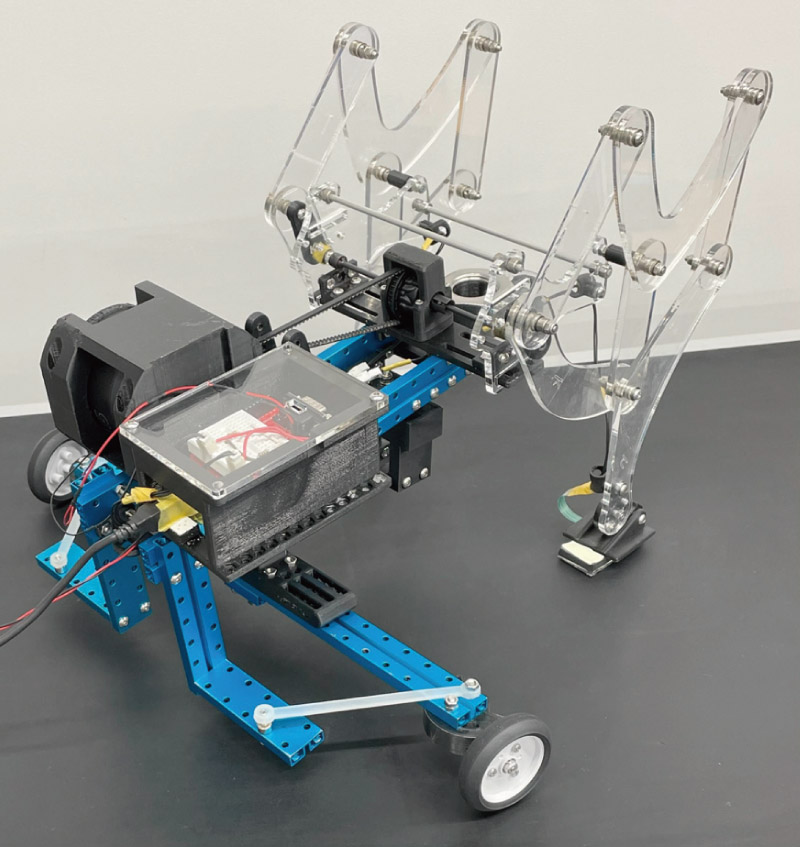
Our robot with differential mechanism
- [1] R. M. Alexander, “The gaits of bipedal and quadrupedal animals,” Int. J. Robot. Res., Vol.3, No.2, pp. 49-59, 1984. https://doi.org/10.1177/027836498400300205
- [2] R. M. Alexander, “Bipedal animals, and their differences from humans,” J. Anat., Vol.204, No.5, pp. 321-330, 2004. https://doi.org/10.1111/j.0021-8782.2004.00289.x
- [3] P. Fihl and T. B. Moeslund, “Classification of gait types based on the duty-factor,” IEEE Conf. on Advanced Video and Signal Based Surveillance, 2007. https://doi.org/10.1109/AVSS.2007.4425330
- [4] A. E. Minetti, “The biomechanics of skipping gaits: A third locomotion paradigm?,” Proc. Biol. Sci., Vol.265, No.1402, pp. 1227-1235, 1998. https://doi.org/10.1098/rspb.1998.0424
- [5] D. M. Wilson, “Insect walking,” Annu. Rev. Entomol., Vol.11, pp. 103-122, 1966. https://doi.org/10.1146/annurev.en.11.010166.000535
- [6] K. Naniwa et al., “Novel Method for Analyzing Flexible Locomotion Patterns of Animals by Using Polar Histogram,” J. Robot. Mechatron., Vol.32, No.4, pp. 812-821, 2020. https://doi.org/10.20965/jrm.2020.p0812
- [7] G. Hayes and R. M. Alexander, “The hopping gaits of crows (Corvidae) and other bipeds,” J. Zool., Vol.200, No.2, pp. 205-213, 1983. https://doi.org/10.1111/j.1469-7998.1983.tb05784.x
- [8] D. F. Hoyt and C. R. Taylor, “Gait and the energetics of locomotion in horses,” Nature, Vol.292, No.5820, pp. 239-240, 1981. https://doi.org/10.1038/292239a0
- [9] T. J. Dawson and C. R. Taylor, “Energetic cost of locomotion in kangaroos,” Nature, Vol.246, No.5431, pp. 313-314, 1973. https://doi.org/10.1038/246313a0
- [10] Z. Wang et al., “Optimization design and performance analysis of a bionic knee joint based on the geared five-bar mechanism,” Bioengineering (Basel), Vol.10, No.5, Article No.582, 2023. https://doi.org/10.3390/bioengineering10050582
- [11] A. Sayyad, B. Seth, and P. Seshu, “Single-legged hopping robotics research—A review,” Robotica, Vol.25, No.5, pp. 587-613, 2007. https://doi.org/10.1017/S0263574707003487
- [12] G. Heppner et al., “LAUROPE – Six legged walking robot for planetary exploration participating in the SPACEBOT cup,” WS Adv. Space Technol. Robot. Autom., Vol.2, No.13, pp. 69-76, 2015.
- [13] T. Kinugasa and Y. Sugimoto, “Dynamically and Biologically Inspired Legged Locomotion: A Review,” J. Robot. Mechatron., Vol.29, No.3, pp. 456-470, 2017. https://doi.org/10.20965/jrm.2017.p0456
- [14] G. Taga, Y. Yamaguchi, and H. Shimizu, “Self-organized control of bipedal locomotion by neural oscillators in unpredictable environment,” Biol. Cybern., Vol.65, pp. 147-159, 1991. https://doi.org/10.1007/BF00198086
- [15] E. Marder and D. Bucher, “Central pattern generators and the control of rhythmic movements,” Curr. Biol., Vol.11, No.23, pp. R986-R996, 2001. https://doi.org/10.1016/s0960-9822(01)00581-4
- [16] J. J. Collins and S. A. Richmond, “Hard-wired central pattern generators for quadrupedal locomotion,” Biol. Cybern., Vol.71, pp. 375-385, 1994. https://doi.org/10.1007/BF00198915
- [17] Y. Fukuoka, Y. Habu, and T. Fukui, “A simple rule for quadrupedal gait generation determined by leg loading feedback: A modeling study,” Sci. Rep., Vol.5, Article No.8169, 2015. https://doi.org/10.1038/srep08169
- [18] A. J. Ijspeert, “Central pattern generators for locomotion control in animals and robots: A review,” Neural Netw., Vol.21, No.4, pp. 642-653, 2008. https://doi.org/10.1016/j.neunet.2008.03.014
- [19] D. Owaki and A. Ishiguro, “A quadruped robot exhibiting spontaneous gait transitions from walking to trotting to galloping,” Sci. Rep., Vol.7, No.1, Article No.277, 2017. https://doi.org/10.1038/s41598-017-00348-9
- [20] T. Fukui, S. Matsukawa, Y. Habu, and Y. Fukuoka, “Gait transition from pacing by a quadrupedal simulated model and robot with phase modulation by vestibular feedback,” Robotics, Vol.11, No.1, Article No.3, 2022. https://doi.org/10.3390/robotics11010003
- [21] J. Humphreys et al., “Bio-inspired gait transitions for quadruped locomotion,” IEEE Robot. Autom. Lett., Vol.8, No.10, pp. 6131-6138, 2023. https://doi.org/10.1109/LRA.2023.3300249
- [22] C. P. Santos and V. Matos, “Gait transition and modulation in a quadruped robot: A brainstem-like modulation approach,” Robot. Auton. Syst., Vol.59, No.9, pp. 620-634, 2011. https://doi.org/10.1016/j.robot.2011.05.003
- [23] S. Grillner, “Locomotion in vertebrates: Central mechanisms and reflex interaction,” Physiol. Rev., Vol.55, No.2, pp. 247-304, 1975. https://doi.org/10.1152/physrev.1975.55.2.247
- [24] T. G. Brown, “The intrinsic factors in the act of progression in the mammal,” Proc. Biol. Sci., Vol.84, No.572, pp. 308-319, 1911. https://doi.org/10.1098/rspb.1911.0077
- [25] T. McGeer, “Passive dynamic walking,” Intern. J. Robot. Res., Vol.9, No.2, pp. 62-82, 1990. https://doi.org/10.1177/027836499000900206
- [26] T. McGeer, “Passive walking with knees,” IEEE Int. Conf. on Robotics and Automation, pp. 1640-1645, 1990. https://doi.org/10.1109/ROBOT.1990.126245
- [27] T. McGeer, “Principles of walking and running,” Adv. Comp. Environ. Physiol., pp. 113-139, 1992.
- [28] L. Li et al., “High-Frequency Vibration of Leg Masses for Improving Gait Stability of Compass Walking on Slippery Downhill,” J. Robot. Mechatron., Vol.31, No.4, pp. 621-628, 2019. https://doi.org/10.20965/jrm.2019.p0621
- [29] S. Collins et al., “Efficient bipedal robots based on passive-dynamic walkers,” Science, Vol.307, No.5712, pp. 1082-1085, 2005. https://doi.org/10.1126/science.1107799
- [30] M. W. Spong and F. Bullo, “Controlled symmetries and passive walking,” IEEE Trans. Autom. Control, Vol.50, No.7, pp. 1025-1031, 2005. https://doi.org/10.1109/TAC.2005.851449
- [31] O. Makarenkov, “Existence and stability of limit cycles in the model of a planar passive biped walking down a slope,” Proc. Math. Phys. Eng. Sci., Vol.476, No.2233, Article No.20190450, 2020. https://doi.org/10.1098/rspa.2019.0450
- [32] M. Garcia et al., “The simplest walking model: Stability, complexity, and scaling,” J. Biomech. Eng., Vol.120, No.2, pp. 281-288, 1998. https://doi.org/10.1115/1.2798313
- [33] S. Iqbal et al., “Bifurcations and chaos in passive dynamic walking: A review,” Robot. Auton. Syst., Vol.62, No.6, pp. 889-909, 2014. https://doi.org/10.1016/j.robot.2014.01.006
- [34] S. Aoi et al., “A stability-based mechanism for hysteresis in the walk–trot transition in quadruped locomotion,” J. R. Soc. Interface, Vol.10, No.81, Article No.20120908, 2013. https://doi.org/10.1098/rsif.2012.0908
- [35] S. H. Strogatz, “Nonlinear Dynamics and Chaos: With Applications to Physics, Biology, Chemistry, and Engineering,” pp. 44-79, CRC Press, 2000.
- [36] A. Goswami, B. Thuilot, and B. Espiau, “A study of the Passive Gait of a Compass-Like Biped Robot: Symmetry and Chaos,” Int. J. Robot. Res., Vol.17, No.12, pp. 1282-1301, 1998. https://doi.org/10.1177/027836499801701202
- [37] K. Osuka and K. Kirihara, “Motion analysis and experiment of passive walking robot QUARTET II,” J. of the Robotics Society of Japan, Vol.18, No.5, pp. 737-742, 2000 (in Japanese). https://doi.org/10.7210/jrsj.18.737
- [38] S. Aoi et al., “Advanced turning maneuver of a many-legged robot using pitchfork bifurcation,” IEEE Trans. Robot., Vol.38, No.5, pp. 3015-3026, 2022. https://doi.org/10.1109/TRO.2022.3158194
- [39] M. Okada and K. Iwano, “Human interface design for semi-autonomous control of leader-follower excavator based on variable admittance and stagnation/trajectory bifurcation of nonlinear dynamics,” Mech. Eng. J., Vol.8, No.6, Article No.21-00127, 2021. https://doi.org/10.1299/mej.21-00127
- [40] X. Chen et al., “Foot Shape-Dependent Resistive Force Model for Bipedal Walkers on Granular Terrains,” Int. Conf. on Robotics and Automation, pp. 13093-13099, 2024. https://doi.org/10.1109/ICRA57147.2024.10610190
- [41] N. Scianca et al., “MPC for Humanoid Gait Generation: Stability and Feasibility,” Trans. on Robotics, Vol.36, No.4, pp. 1171-1188, 2020. https://doi.org/10.1109/TRO.2019.2958483
- [42] C. Chevallereau et al., “Self-synchronization and Self-stabilization of 3D Bipedal Walking Gaits,” Robotics and Autonomous Systems, Vol.100, pp. 43-60, 2018. https://doi.org/10.1016/j.robot.2017.10.018
- [43] K. Isomura et al., “Full time two-leg drive bipedal robot: Analysis of gait pattern generations under constraints of reaction forces equality,” Int. Conf. on Advanced Mechatronics, pp. 86-87, 2021. https://doi.org/10.1299/jsmeicam.2021.7.GS6-4
- [44] C. Singh et al., “A Study on Vehicle Differential system,” Int. J. Sci. Res. Manag., Vol.2, No.11, pp. 1680-1683, 2014.
- [45] S. Shinde et al., “Review paper on design of types of mechanical differentials used in automobiles,” Int. Res. J. Modernization Eng. Technol. Sci., Vol.3, No.1, pp. 1023-1031, 2021.
- [46] D. R. Hartree, “The Wave Mechanics of an Atom with a Non-Coulomb Central Field. Part II. Some Results and Discussion,” Math. Proc. Camb. Phil. Soc., Vol.24, No.1, pp. 111-132, 1928. https://doi.org/10.1017/S0305004100011920
- [47] H. Li et al., “Elastic-viscoplastic self-consistent modeling for finite deformation of polycrystalline materials,” Mater. Sci. Eng. A, Vol.799, No.2, Article No.140325, 2021. https://doi.org/10.1016/j.msea.2020.140325
- [48] K. Masani, M. Kouzaki, and T. Fukunaga, “Variability of ground reaction forces during treadmill walking,” J. App. Physiol., Vol.92, No.5, pp. 1885-1890, 2002. https://doi.org/10.1152/japplphysiol.00969.2000
- [49] T. Kobayashi et al., “Ground reaction forces during double limb stances while walking in individuals with unilateral transfemoral amputation,” Front. Bioeng. Biotechnol., Vol.10, Article No.1041060, 2022. https://doi.org/10.3389/fbioe.2022.1041060
- [50] A. Karatsidis et al., “Estimation of Ground Reaction Forces and Moments during Gait Using Only Inertial Motion Capture,” Sensors, Vol.17, No.1, Article No.75, 2017. https://doi.org/10.3390/s17010075
- [51] G. Gabrielli and T. von Karman, “What price speed?,” Vol.63, No.1, pp. 188-200, 1951. https://doi.org/10.1111/j.1559-3584.1951.tb02891.x
- [52] V. A. Tucker, “The Energetic Cost of Moving About,” Am. Sci., Vol.63, No.4, pp. 413-419, 1975.
- [53] A. Badri-Spröwitz et al., “BirdBot achieves energy-efficient gait with minimal control using avian-inspired leg clutching,” Sci. Robot., Vol.7, No.64, Article No.eabg4055, 2022. https://doi.org/10.1126/scirobotics.abg4055
- [54] A. Comoretto et al., “Physical synchronization of soft self-oscillating limbs for fast and autonomous locomotion,” Science, Vol.388, No.6747, pp. 610-615, 2025. https://doi.org/10.1126/science.adr3661
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.