Paper:
Design and Evaluation of a Two-Wheeled Weeding Robot for Paddy Fields
Hiroyuki Inoue*, Hitoshi Sori*, Masashi Sugimoto**
 , Hiroyuki Hatta***, and Yasuhiro Ando***
, Hiroyuki Hatta***, and Yasuhiro Ando***
*National Institute of Technology, Tsuyama College
624-1 Numa, Tsuyama, Okayama 708-8509, Japan
**National Institute of Technology, Tomakomai College
443 Nishikioka, Tomakomai, Hokkaido 059-1275, Japan
***IKOMA Robotech Corporation
634-28 Toshima, Tsuyama, Okayama 708-0016, Japan

Recently, consumers have shown a high level of interest in food safety and security, as well as in reducing environmental impacts. Therefore, for rice, which is the staple food of the Japanese people, its cultivation without the use of herbicides or chemical fertilizers is desired. This paper proposes a two-wheeled weeding robot that floats on a water surface and is equipped with a movable mechanism in which large-diameter wheels contact the soil under their own weight in response to water level height and soil unevenness. The robot body was designed to float on water by placing floats on both sides and spanning the rice row, enabling it to continue moving even as the rice grows. The movable system utilizes a simple yet robust four-bar linkage, which is designed to accommodate soil adhesion. This study first clarified the design method for a four-bar linkage mechanism. Next, it experimentally investigated the effect of the angle of paddles attached to the wheels on the propulsive force. Finally, it experimentally confirmed the effectiveness of the proposed weeding robot.
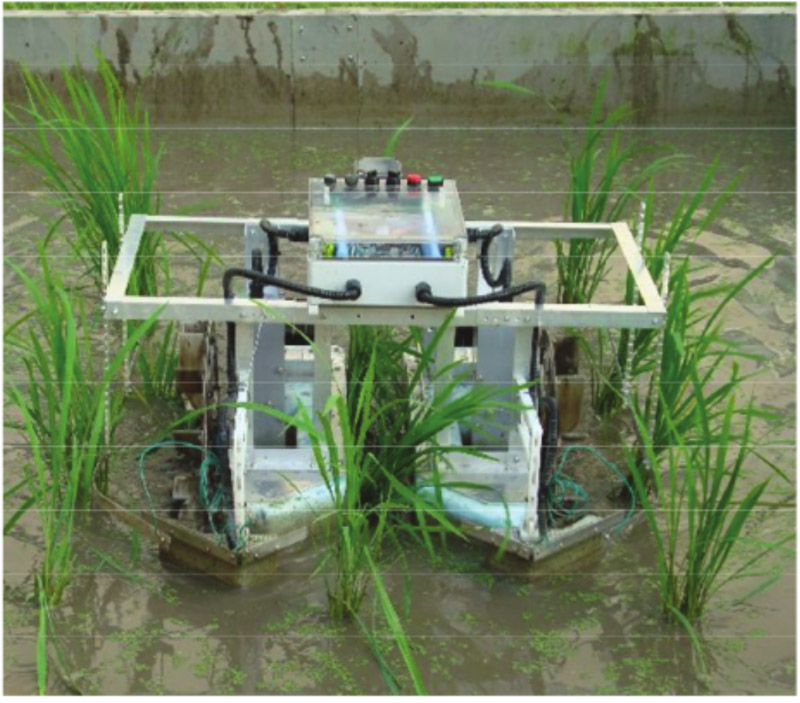
Two-wheeled weeding robot for paddy fields
- [1] T. Mitsui, T. Kobayashi, T. Kagiya, A. Inaba, and S. Ooba, “Verification of a weeding robot ‘AIGAMO-ROBOT’ for paddy fields,” J. Robot. Mechatron., Vol.20, No.2, pp. 228-233, 2008. https://doi.org/10.20965/jrm.2008.p0228
- [2] S. Nakai and Y. Yamada, “Development of a weed suppression robot for rice cultivation: Weed suppression and posture control,” Int. J. of Mechanical and Mechatronics Engineering, Vol.8, No.12, pp. 1886-1890, 2014.
- [3] Q. Zhang, M. E. S. J. Chen, and B. Li, “A visual navigation algorithm for paddy field weeding robot based on image understanding,” Computers and Electronics in Agriculture, Vol.143, pp. 66-78, 2017. https://doi.org/10.1016/j.compag.2017.09.008
- [4] H. Madokoro et al., “Prototype development of small mobile robots for mallard navigation in paddy fields: Toward realizing remote farming,” Robotics, Vol.10, No.2, Article No.63, 2021. https://doi.org/10.3390/robotics10020063
- [5] K. H. Choi, S. K. Han, K.-H. Park, K.-S. Kim, and S. Kim, “Vision based guidance line extraction for autonomous weed control robot in paddy field,” 2015 IEEE Int. Conf. on Robotics and Biomimetics, pp. 831-836, 2015. https://doi.org/10.1109/ROBIO.2015.7418873
- [6] D. Fujioka, H. Inoue, H. Sori, Y. Ando, and H. Hatta, “Development of turning algorithm for autonomous weeding robot,” Mechanical Engineering Congress 2013, Session No.G151036, 2013 (in Japanese).
- [7] H. Hatta, Y. Ando, K. Iizuka, H. Inoue, and H. Sori, “Development of weeding robot for paddy field,” Mechanical Engineering Congress 2013, Session No.S151013, 2013 (in Japanese).
- [8] S, Akihira, H. Inoue, H. Sori, H. Hatta, and Y. Ando, “Weeding robot control for rice plant line following,” Proc. of the 2015 JSME Conf. on Robotics and Mechatronics, Session No.2P1-B09, 2015 (in Japanese). https://doi.org/10.1299/jsmermd.2015._2P1-B09_1
- [9] K. Namba, H. Inoue, H. Sori, H. Hatta, and Y. Ando, “Rice plant line detection using capacitive touch sensor for weeding robot,” Proc. of the 2015 JSME Conf. on Robotics and Mechatronics, Session No.2P1-B10, 2015 (in Japanese). https://doi.org/10.1299/jsmermd.2015._2P1-B10_1
- [10] H. Sori, H. Inoue, H. Hatta, and Y. Ando, “Effect for a paddy weeding robot in wet rice culture,” J. Robot. Mechatron., Vol.30, No.2, pp. 198-205, 2018. https://doi.org/10.20965/jrm.2018.p0198
- [11] J. Ju et al., “Design and experiment of an adaptive cruise weeding robot for paddy fields based on improved YOLOv5,” Computers and Electronics in Agriculture, Vol.219, Article No.108824, 2024. https://doi.org/10.1016/j.compag.2024.108824
- [12] K. Kameyama and T. Wada, “Adaptation of a small robot for paddy fields to the water depth change using variable legs,” J. Robot. Mechatron., Vol.34, No.1, pp. 159-166, 2022. https://doi.org/10.20965/jrm.2022.p0159
- [13] R. Tabatabaekoloor and M. Rezaei, “Puddling effects on the shear parameters of paddy field soil,” Agricultural J., Vol.8, No.5, pp. 217-221, 2013.
- [14] B. Chen, S. Tojo, and K. Watanabe, “Machine vision for a micro weeding robot in a paddy field,” Biosystems Engineering, Vol.85, No.4, pp. 393-404, 2003. https://doi.org/10.1016/S1537-5110(03)00078-3
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.