Paper:
Development of a Map-Based Energy Consumption Model for Orchard Electric Vehicles Using Field Data
Tomoaki Hizatate*
 and Noboru Noguchi**
and Noboru Noguchi**
*Graduate School of Agriculture, Hokkaido University
Kita 9, Nishi 9, Kita-ku, Sapporo, Hokkaido 060-8589, Japan
**Research Faculty of Agriculture, Hokkaido University
Kita 9, Nishi 9, Kita-ku, Sapporo, Hokkaido 060-8589, Japan

This study presents a novel map-based energy consumption prediction model for agricultural electric vehicles operating in real orchard environments. Traditional static models often overlook resistance factors caused by varying terrain and soil conditions. To address this, we introduce an unknown resistance component Fu, mapped spatially to reflect local environmental influences such as slope and soil hardness. Field experiments were conducted in a vineyard in Hokkaido, Japan, using GNSS and battery data collected at 10 Hz during uphill and downhill runs. The proposed model achieved a maximum mean absolute percentage error of 2.3%, significantly outperforming conventional models. A notable negative correlation between Fu and soil hardness was observed, confirming that softer soils increase vehicle resistance. Simulations of continuous operations across adjacent routes further demonstrated reduced cumulative prediction errors, supporting applications in route planning and battery management. Fu(x,y) is currently treated as static, and future work will expand it to a spatiotemporal parameter Fu(x,y,t) to incorporate dynamic environmental changes. Online learning and validation across diverse terrains are also planned. This approach enhances model adaptability, offering a reliable tool for energy-efficient and sustainable operation of electric vehicles in agriculture.
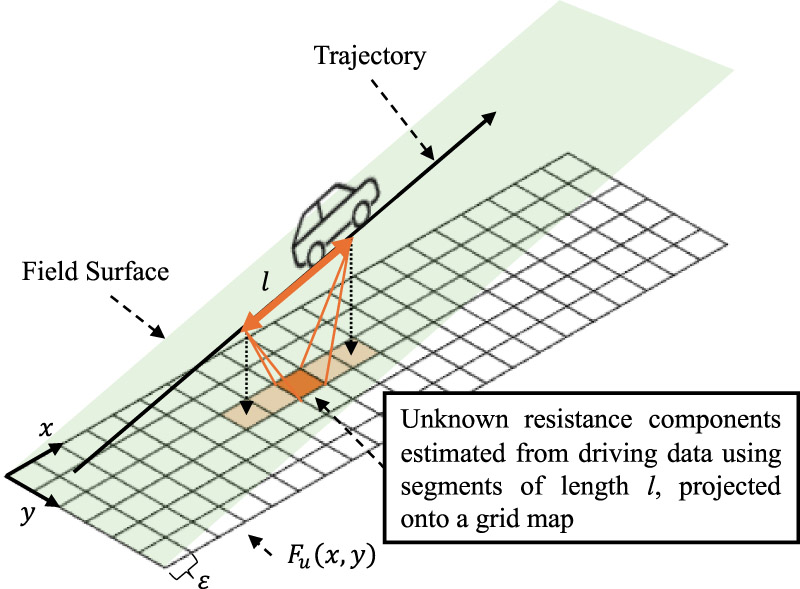
Mapping unknown resistance onto grid from driving data
- [1] N. Noguchi, “Agricultural vehicle robot,” J. Robot. Mechatron., Vol.30, No.2, pp. 165-172, 2018. https://doi.org/10.20965/jrm.2018.p0165
- [2] T. Hizatate and N. Noguchi, “Work schedule optimization for electric agricultural robots in orchards,” Comput. Electron. Agric., Vol.210, Article No.107889, 2023. https://doi.org/10.1016/J.COMPAG.2023.107889
- [3] T. Oksanen and A. Visala, “Coverage path planning algorithms for agricultural field machines,” J. Field Robot., Vol.26, No.8, pp. 651-668, 2009. https://doi.org/10.1002/ROB.20300
- [4] K. Zhou, A. L. Jensen, C. G. Sørensen, P. Busato, and D. D. Bothtis, “Agricultural operations planning in fields with multiple obstacle areas,” Comput. Electron. Agric., Vol.109, pp. 12-22, 2014. https://doi.org/10.1016/J.COMPAG.2014.08.013
- [5] D. D. Bochtis and S. G. Vougioukas, “Minimising the non-working distance travelled by machines operating in a headland field pattern,” Biosyst. Eng., Vol.101, No.1, pp. 1-12, 2008. https://doi.org/10.1016/J.BIOSYSTEMSENG.2008.06.008
- [6] A. Utamima and A. Djunaidy, “Agricultural routing planning: A narrative review of literature,” Procedia Comput. Sci., Vol.197, pp. 693-700, 2022. https://doi.org/10.1016/J.PROCS.2021.12.190
- [7] J. Conesa-Muñoz, J. M. Bengochea-Guevara, D. Andujar, and A. Ribeiro, “Efficient distribution of a fleet of heterogeneous vehicles in agriculture: A practical approach to multi-path planning,” 2015 IEEE Int. Conf. on Autonomous Robot Systems and Competitions, pp. 56-61, 2015. https://doi.org/10.1109/ICARSC.2015.39
- [8] S. Li et al., “Intelligent scheduling method for multi-machine cooperative operation based on NSGA-III and improved ant colony algorithm,” Comput. Electron. Agric., Vol.204, Article No.107532, 2023. https://doi.org/10.1016/J.COMPAG.2022.107532
- [9] N. Wang et al., “Collaborative path planning and task allocation for multiple agricultural machines,” Comput. Electron. Agric., Vol.213, Article No.108218, 2023. https://doi.org/10.1016/j.compag.2023.108218
- [10] N. Noguchi, “Work schedule creation for agricultural mobile robots using genetic algorithms,” IFAC Proc. Volumes, Vol.32, No.2, pp. 5587-5591, 1999. https://doi.org/10.1016/S1474-6670(17)56952-9
- [11] Y. Xu et al., “Path planning and scheduling of multiple unmanned ground vehicles for orchard plant protection operations,” Comput. Electron. Agric., Vol.237, Part B, Article No.110615, 2025. https://doi.org/10.1016/J.COMPAG.2025.110615
- [12] M. Vahdanjoo, R. Gislum, and C. A. G. Sørensen, “Three-dimensional area coverage planning model for robotic application,” Comput. Electron. Agric., Vol.219, Article No.108789, 2024. https://doi.org/10.1016/j.compag.2024.108789
- [13] J. Romero Schmidt and F. Auat Cheein, “Assessment of power consumption of electric machinery in agricultural tasks for enhancing the route planning problem,” Comput. Electron. Agric., Vol.163, Article No.104868, 2019. https://doi.org/10.1016/j.compag.2019.104868
- [14] Y. Yamasaki, K. Ishii, and N. Noguchi, “Speed control of an autonomous electric vehicle for orchard spraying,” Comput. Electron. Agric., Vol.236, Article No.110419, 2025. https://doi.org/10.1016/J.COMPAG.2025.110419
- [15] Ministry of Agriculture, Forestry and Fisheries (MAFF), “Kaju wo meguru josei” [Fruit production trends in Japan], 2025 (in Japanese). https://www.maff.go.jp/j/seisan/ryutu/fruits/index.html [Accessed January 14, 2026]
- [16] Kubota, “Compact tractors Kubota LXe series.” https://kuk.kubota-eu.com/groundcare/series/lxe-series/ [Accessed September 12, 2025]
- [17] John Deere, “All quiet on the farm.” https://www.deere.com/en/stories/featured/electric-tractor/ [Accessed September 12, 2025]
- [18] Monarch Tractor, “World’s first electric autonomous tractor: Monarch tractor.” https://www.monarchtractor.com/ [Accessed September 12, 2025]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.