Paper:
Investigation of a Network Model for Educational-Support Robots Using RSNP
Shogo Maki*, Felix Jimenez**
 , Hiroki Kaede*
, and Koki Sato*
, Hiroki Kaede*
, and Koki Sato*
*Graduate School of Information Science and Technology, Aichi Prefectural University
1522-3 Ibaragabasama, Nagakute, Aichi 480-1198, Japan
**School of Information Science and Technology, Aichi Prefectural University
1522-3 Ibaragabasama, Nagakute, Aichi 480-1198, Japan

In recent years, the number of robots that interact with humans, such as guidance robots, has been increasing in commercial and public facilities. In educational-support robots have attracted attention in educational institutions owing to their effectiveness in supporting learning. Additionally, initiatives to advance the widespread use of robots through networked communication have led to the development, the Robot Service Network Protocol (RSNP), which is designed exclusively for robots. RSNP offers the advantages of secure communication with authentication and easy implementation across a wide variety of robots in a function-oriented library that accounts for multiple robot use conditions. In this study, we networked educational-support robots using RSNP and verified their practicality through load verification. Educational-support robots require a large amount of data to communicate during a single learning session, such as the facial expressions and grades of the learners, and secure and stable communication is required. In our experiments, we compared the data communication processing between RSNP and Hypertext Transfer Protocol (HTTP). Additionally, we conducted load testing of RSNP under multiple conditions that assume high-frequency communication processing. The experimental results show that RSNP achieves a processing speed comparable to that of HTTP while exerting minimal impact on overall processing performance. This study demonstrates that RSNP communication is more effective than HTTP for educational-support robots.
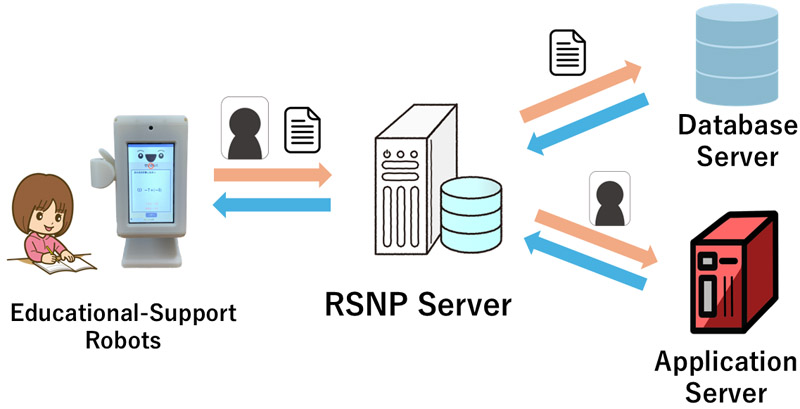
Learning with robot via RSNP
- [1] N. Akiya et al., “Sociological analysis of human interaction at a nursing home for helper robot development,” IEICE Trans. on Information and Systems (Japanese Edition), Vol.J90-D, No.3, pp. 798-807, 2007 (in Japanese).
- [2] N. Mibu, C. Mori, M. Nagashima, K. Tsuruoka, and S. Takeuchi, “Introduction of nursing care robots to long-term care welfare facilities and related issues: Results of postal and on-site surveys,” Japanese J. of Gerontology, Vol.44, No.1, pp. 19-29, 2022 (in Japanese). https://doi.org/10.34393/rousha.44.1_19
- [3] Y. Hoshi et al., “Analysis of human-to-human dialogue while watching TV for social robots’ utterance,” The J. of the Institute of Image Information and Television Engineers, Vol.77, No.1, pp. 149-156, 2023 (in Japanese). https://doi.org/10.3169/itej.77.149
- [4] N. Kubota, “Research and development towards social implementation of communication robots,” J. of Japan Society for Fuzzy Theory and Intelligent Informatics, Vol.31, No.5, pp. 147-153, 2019 (in Japanese). https://doi.org/10.3156/jsoft.31.5_147
- [5] W. Meng et al., “A systematic review of the effectiveness of online learning in higher education during the COVID-19 pandemic period,” Frontiers in Education, Vol.8, Article No.1334153, 2024. https://doi.org/10.3389/feduc.2023.1334153
- [6] T. Kanda, T. Hirano, D. Eaton, and H. Ishiguro, “Interactive robots as social partners and peer tutors for children: A field trial,” Human-Computer Interaction, Vol.19, Nos.1-2, pp. 61-84, 2004. https://doi.org/10.1080/07370024.2004.9667340
- [7] O.-H. Kwon, S.-Y. Koo, Y.-G. Kim, and D.-S. Kwon, “Telepresence robot system for English tutoring,” 2010 IEEE Workshop on Advanced Robotics and its Social Impacts, pp. 152-155, 2010. https://doi.org/10.1109/ARSO.2010.5679999
- [8] F. Jimenez, T. Yoshikawa, T. Furuhashi, and M. Kanoh, “Effects of a novel sympathy-expression method on collaborative learning among junior high school students and robots,” J. Robot. Mechatron., Vol.30, No.2, pp. 282-291, 2018. https://doi.org/10.20965/jrm.2018.p0282
- [9] K. Miyauchi, F. Jimenez, T. Yoshikawa, T. Furuhashi, and M. Kanoh, “Learning effects of robots teaching based on cognitive apprenticeship theory,” J. Adv. Comput. Intell. Intell. Inform., Vol.24, No.1, pp. 101-112, 2020. https://doi.org/10.20965/jaciii.2020.p0101
- [10] K. Okawa, F. Jimenez, S. Akizuki, and T. Yoshikawa, “Proposal of learning support model for teacher-type robot supporting learning according to learner’s perplexed facial expressions,” J. Robot. Mechatron., Vol.36, No.1, pp. 168-180, 2024. https://doi.org/10.20965/jrm.2024.p0168
- [11] H. Kaede, F. Jimenez, and T. Miyamoto, “Impact of negotiating the number of solved problems by a robot on junior high school students in collaborative learning,” J. Robot. Mechatron., Vol.37, No.3, pp. 637-647, 2025. https://doi.org/10.20965/jrm.2025.p0637
- [12] K. Wang, G.-Y. Sang, L.-Z. Huang, S.-H. Li, and J.-W. Guo, “The effectiveness of educational robots in improving learning outcomes: A meta-analysis,” Sustainability, Vol.15, No.5, Article No.4637, 2023. https://doi.org/10.3390/su15054637
- [13] T. Talan, “The effect of educational robotic applications on academic achievement: A meta-analysis study,” Int. J. of Technology in Education and Science, Vol.5, No.4, pp. 512-526, 2021.
- [14] M. Narita et al., “Development of RSNP (Robot Service Network Protocol) 2.0 targeting a robot service platform in diffusion period,” J. of the Robotics Society of Japan, Vol.27, No.8, pp. 857-867, 2009 (in Japanese). https://doi.org/10.7210/jrsj.27.857
- [15] Robot Service Initiative, “Robot Service Network Protocol 2.3 Specification,” 2010.
- [16] H. Osawa et al., “Robot service platform for integration of voice communication with robot control by RSNP extended,” J. of the Robotics Society of Japan, Vol.33, No.2, pp. 103-114, 2015 (in Japanese). https://doi.org/10.7210/jrsj.33.103
- [17] M. Narita et al., “A development of a stamp rally and questionaries’ service using CRSP with the aim of applying to the marketing research – Evolution of the cloud-based robot services platform project –,” Trans. of the Japanese Society for Artificial Intelligence, Vol.32, No.1, pp. NFC-B_1-13, 2017 (in Japanese). https://doi.org/10.1527/tjsai.NFC-B
- [18] F. Jimenez and M. Kanoh, “Support system for teachers in communication with educational support robot,” J. Adv. Comput. Intell. Intell. Inform., Vol.24, No.3, pp. 377-385, 2020. https://doi.org/10.20965/jaciii.2020.p0377
- [19] M. Nuñez, X.-L. Palmer, L. Potter, C. J. Aliac, and L. C. Velasco, “ICT security tools and techniques among higher education institutions: A critical review,” Int. J. of Emerging Technologies in Learning, Vol.18, No.15, pp. 4-22, 2023. https://doi.org/10.3991/ijet.v18i15.40673
- [20] T. Furuhashi (Ed.) (supervised by Y. Kaneda and M. Sasaki), “Statistics, multivariate analysis and soft computing: Toward analysis of systems with ultra many degrees of freedom,” Kyoritsu Shuppan Co., Ltd., 2012 (in Japanese).
- [21] S. Maki and F. Jimenez, “Effectiveness of using RSNP in network collaboration for educational support robots,” Proc. of the 40th Fuzzy System Symposium, pp. 731-736, 2024 (in Japanese). https://doi.org/10.14864/fss.40.0_731
- [22] K. Sato, K. Okawa, F. Jimenez, S. Akizuki, and T. Yoshikawa, “Simulation results of a spatio-temporal perplexion estimation method based on learners’ facial expression changes,” Joint 13th Int. Conf. on Soft Computing and Intelligent Systems and 25th Int. Symp. on Advanced Intelligent Systems, 2024. https://doi.org/10.1109/SCISISIS61014.2024.10760094
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.