Paper:
Development of Crab-Inspired Robot with Exoskeletal Structure and Embedded Pneumatic Artificial Pennate Muscles
Daisuke Nakanishi*
 , Hiroki Hamaguchi*, Yuta Hasegawa*, Keisuke Naniwa**
, and Yasuhiro Sugimoto***
, Hiroki Hamaguchi*, Yuta Hasegawa*, Keisuke Naniwa**
, and Yasuhiro Sugimoto***
*National Institute of Technology, Matsue College
14-4 Nishi-ikuma, Matsue, Shimane 690-8518, Japan
**Hokkaido University of Science
7-Jo, 15-4-1 Maeda, Teine-ku, Sapporo, Hokkaido 006-8585, Japan
***The University of Osaka
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan

Pneumatic artificial muscles (PAMs) are soft actuators that generate tension via contraction when supplied with compressed air. Although PAMs have been widely used in robots mimicking endoskeletal organisms, recent advancements in millimeter-scale thin PAMs have enabled a more precise replication of complex musculoskeletal systems. In contrast, exoskeletal organisms, such as crustaceans and insects actuate their joints using pennate muscles embedded within their exoskeletons. However, integrating actuators into the exoskeletons of exoskeletal-inspired robots is challenging owing to spatial constraints. Consequently, wire and servo-driven mechanisms are predominantly employed, and studies on exoskeletal robots incorporating the muscle-apodeme structures of exoskeletal organisms remain largely unexplored. To address this gap, this paper presents the development of a crab-inspired robotic walking leg featuring an exoskeletal structure with embedded pneumatic artificial pennate muscles, modeled after the muscle-apodeme structures of snow crabs. The experimental evaluations demonstrated that the robot successfully performed joint opening and closing motions, achieving a range of motion comparable to that of a snow crab.
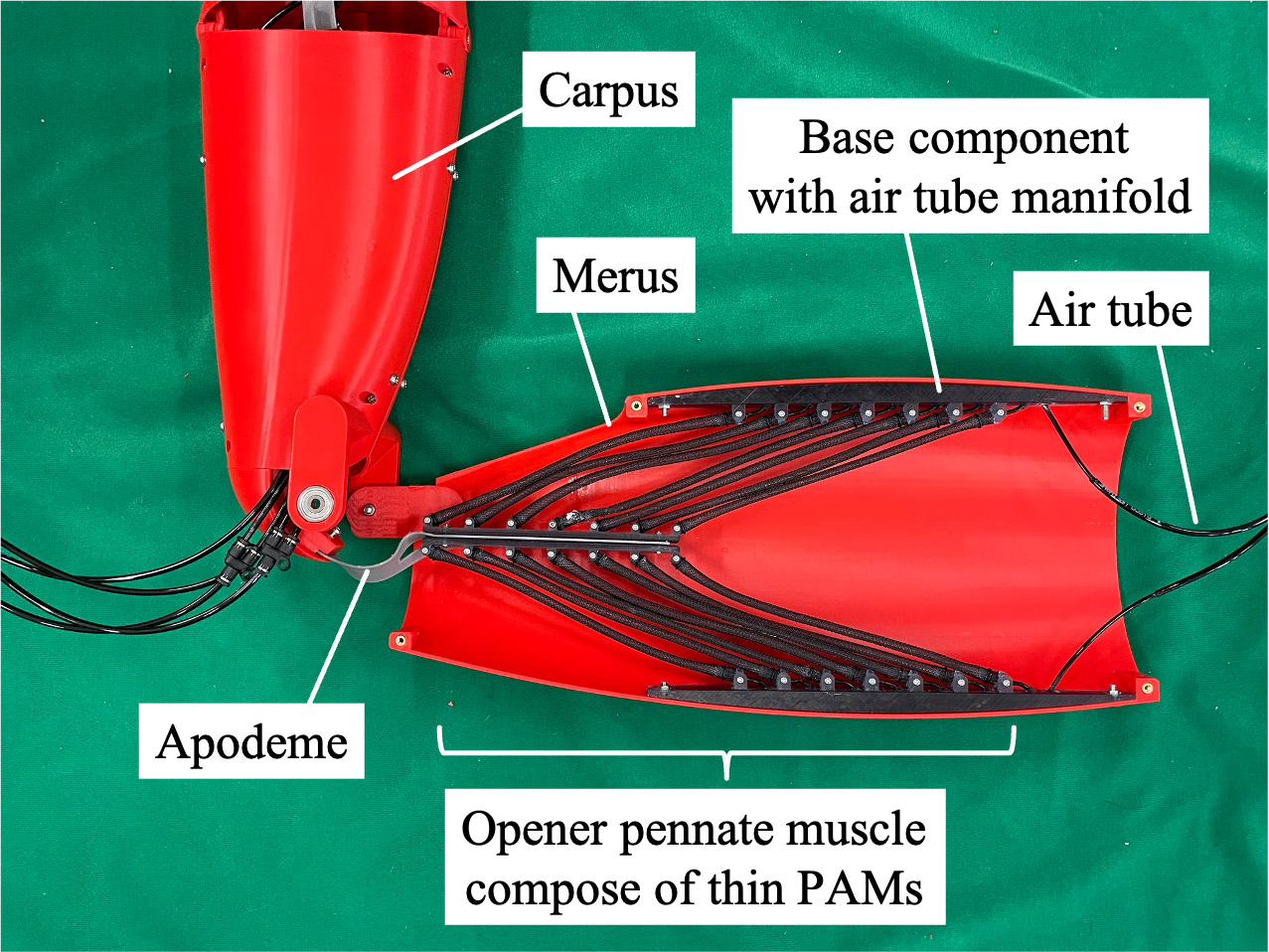
Crab-inspired exoskeletal leg robot with thin PAMs
- [1] V. L. Nickel, J. Perry, and A. L. Garrett, “Development of Useful Function in the Severely Paralyzed Hand,” J. of Bone and Joint Surgery, Vol.45, No.5, pp. 933-952, 1963. https://doi.org/10.2106/00004623-196345050-00004
- [2] K. Hosoda, T. Takuma, A. Nakamoto, and S. Hayashi, “Biped robot design powered by antagonistic pneumatic actuators for multi-modal locomotion,” Robotics and Autonomous Systems, Vol.56, No.1, pp. 46-53, 2008. https://doi.org/10.1016/j.robot.2007.09.010
- [3] R. Niiyama, S. Nishikawa, and Y. Kuniyoshi, “Biomechanical Approach to Open-Loop Bipedal Running with a Musculoskeletal Athlete Robot,” Advanced Robotics, Vol.26, Nos.3-4, pp. 383-398, 2012. https://doi.org/10.1163/156855311X614635
- [4] R. Niiyama, A. Nagakubo, and Y. Kuniyoshi, “Mowgli: A Bipedal Jumping and Landing Robot with an Artificial Musculoskeletal System,” Proc. 2007 IEEE Int. Conf. on Robotics and Automation, pp. 2546-2551, 2007. https://doi.org/10.1109/ROBOT.2007.363848
- [5] S. Kumakura and I. Mizuuchi, “Developing a super-small high-pressure compressor and a regenerative air pressure system for high efficiency of self-contained pneumatic robots,” Proc. of The 9th JFPS Int. Symposium on Fluid Power, pp. 305-310, 2014.
- [6] S. Wakimoto, “Development and application of thin Mckibben artificial muscles,” J. of the Society of Instrument and Control Engineers, Vol.57, No.11, pp. 812-815, 2018 (in Japanese). https://doi.org/10.11499/sicejl.57.812
- [7] R. Kobayashi, H. Nabae, Z. Mao, G. Endo, and K. Suzumori, “Enhancement of Thin McKibben Muscle Durability Under Repetitive Actuation in a Bent State,” IEEE Robotics and Automation Letters, Vol.9, No.11, pp. 9685-9692, 2024. https://doi.org/10.1109/LRA.2024.3455890
- [8] R. Kobayashi, H. Nabae, G. Endo, and K. Suzumori, “Soft Tensegrity Robot Driven by Thin Artificial Muscles for the Exploration of Unknown Spatial Configurations,” IEEE Robotics and Automation Letters, Vol.7, No.2, pp. 5349-5356, 2022. https://doi.org/10.1109/LRA.2022.3153700
- [9] G. Na, H. Nabae, and K. Suzumori, “Braided thin McKibben muscles for musculoskeletal robots,” Sensors and Actuators A: Physical, Vol.357, Article No.114381, 2023. https://doi.org/10.1016/j.sna.2023.114381
- [10] S. Kurumaya, K. Suzumori, H. Nabae, and S. Wakimoto, “Musculoskeletal lower-limb robot driven by multifilament muscles,” ROBOMECH J., Vol.3, Article No.18, 2016. https://doi.org/10.1186/s40648-016-0061-3
- [11] A. Garriga-Casanovas, A. M. Faudzi, T. Hiramitsu, F. R. y. Baena, and K. Suzumori, “Multifilament pneumatic artificial muscles to mimic the human neck,” 2017 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), pp. 809-816, 2017. https://doi.org/10.1109/ROBIO.2017.8324517
- [12] H. Sison, P. Ratsamee, M. Higashida, Y. Uranishi, and H. Takemura, “Generation of Inverted Locomotion Gait for Multi-Legged Robots Using a Spherical Magnetic Joint and Adjustable Sleeve,” J. Robot. Mechatron., Vol.35, No.5, pp. 1227-1242, 2023. https://doi.org/10.20965/jrm.2023.p1227
- [13] Y. Zhao, J. Wang, G. Cao, Y. Yuan, X. Yao, and L. Qi, “Intelligent Control of Multilegged Robot Smooth Motion: A Review,” IEEE Access, Vol.11, pp. 86645-86685, 2023. https://doi.org/10.1109/ACCESS.2023.3304992
- [14] S. Kitano, S. Hirose, A. Horigome, and G. Endo, “TITAN-XIII: Sprawling-type quadruped robot with ability of fast and energy-efficient walking,” ROBOMECH J., Vol.3, Article No.8, 2016. https://doi.org/10.1186/s40648-016-0047-1
- [15] X. Chen, J. Li, S. Hu, S. Han, K. Liu, B. Pan, J. Wang, G. Wang, and X. Ma, “Study on the Design and Experimental Research on a Bionic Crab Robot with Amphibious Multi-Modal Movement,” J. of Marine Science and Engineering, Vol.10, No.12, Article No.1804, 2022. https://doi.org/10.3390/jmse10121804
- [16] G. F. Warner, “The Biology of Crabs,” Van Nostrand, 1977.
- [17] W. J. Heitler, “The Locust Jump: III. Structural Specializations of the Metathoracic Tibiae,” J. of Experimental Biology, Vol.67, No.1, pp. 29-36, 1977. https://doi.org/10.1242/jeb.67.1.29
- [18] T. G. Bayley, G. P. Sutton, and M. Burrows, “A buckling region in locust hindlegs contains resilin and absorbs energy when jumping or kicking goes wrong,” J. of Experimental Biology, Vol.215, No.7, pp. 1151-1161, 2012. https://doi.org/10.1242/jeb.068080
- [19] W.-C. Chu and S. Hayashi, “Mechano-chemical enforcement of tendon apical ECM into nano-filaments during Drosophila flight muscle development,” Current Biology, Vol.31, No.7, pp. 1366-1378.e7, 2021. https://doi.org/10.1016/j.cub.2021.01.010
- [20] P. A. McLaughlin and R. Lemaitre, “Carcinization in the Anomura – fact or fiction? I. Evidence from adult morphology,” Contributions to Zoology, Vol.67, No.2, pp. 79-123, 1997. https://doi.org/10.1163/18759866-06702001
- [21] D. Nakanishi, Y. Hasegawa, K. Naniwa, and Y. Sugimoto, “Development of bipennate muscles and exoskeleton biomimetic robot with thin-type McKibben pneumatic muscles,” Proc. of the 2024 JSME Conf. on Robotics and Mechatronics, Article No.2A1-L08, 2024 (in Japanese). https://doi.org/10.1299/jsmermd.2024.2A1-L08
- [22] D. Nakanishi, Y. Sugimoto, H. Honda, and K. Osuka, “Measurement Experiments and Analysis for Modeling of McKibben Pneumatic Actuator,” J. Robot. Mechatron., Vol.28, No.6, pp. 830-836, 2016. https://doi.org/10.20965/jrm.2016.p0830
- [23] E. Azizi and A. R. Deslauriers, “Regional heterogeneity in muscle fiber strain: The role of fiber architecture,” Frontiers in Physiology, Vol.5, Article No.303, 2014. https://doi.org/10.3389/fphys.2014.00303
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.