Paper:
Onboard Modular Control and Planning for Autonomous Indoor UAV Navigation on Resource-Constrained CPUs
Alfin Junaedy†
 , Hiroyuki Masuta
, Yotaro Fuse
, Kei Sawai, Ken’ichi Koyanagi, Ahmed Almassri
, and Fengyu Li
, Hiroyuki Masuta
, Yotaro Fuse
, Kei Sawai, Ken’ichi Koyanagi, Ahmed Almassri
, and Fengyu Li
Toyama Prefectural University
5180 Kurokawa, Imizu, Toyama 939-0398, Japan
†Corresponding author

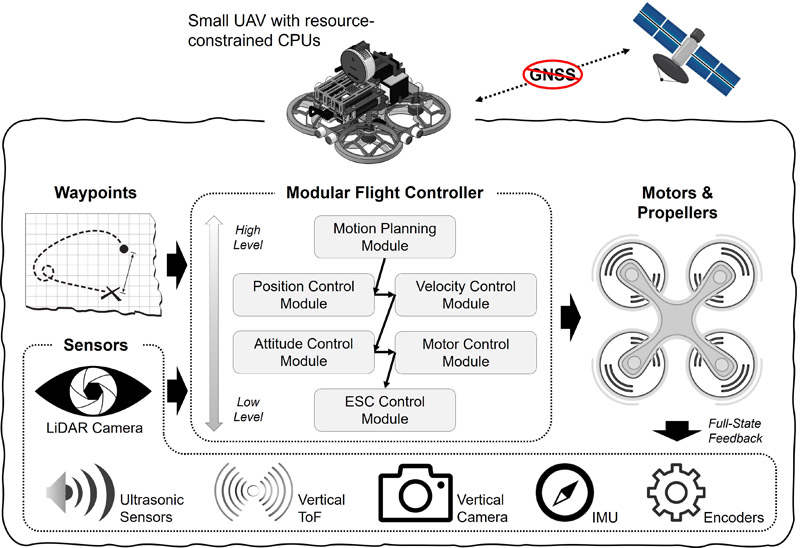
This paper presents a fully onboard control and planning system for indoor quadrotor navigation, leveraging modular control and lightweight motion planning. Autonomous operation of unmanned aerial vehicles (UAVs) in indoor environments, such as inspection, monitoring, and mapping, faces challenges due to the absence of global navigation satellite system (GNSS) and limited onboard computational resources. Existing methods often rely on external localization systems or high-specification CPUs, restricting deployment on compact, low-power UAVs. To address this, we develop a hierarchical control architecture comprising motor, attitude, velocity, and position controllers, all implemented with full-state feedback. Paired with a custom lightweight motion planning algorithm, the system operates efficiently on resource-constrained CPUs such as the Raspberry Pi. This approach enables affordable, low-power UAVs to achieve autonomous indoor navigation without external infrastructure. The results show stable flight performance and computational efficiency, validating suitability for GNSS-denied environments.
Onboard modular UAV control and planning
- [1] Y. Mulgaonkar, G. Cross, and V. Kumar, “Design of small, safe and robust quadrotor swarms,” 2015 IEEE Int. Conf. Robot. Autom., pp. 2208-2215, 2015. https://doi.org/10.1109/ICRA.2015.7139491
- [2] M. Idrissi, M. Salami, and F. Annaz, “A review of quadrotor unmanned aerial vehicles: Applications, architectural design and control algorithms,” J. Intell. Robot. Syst., Vol.104, No.2, Article No.22, 2022. https://doi.org/10.1007/s10846-021-01527-7
- [3] H. Shakhatreh et al., “Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges,” IEEE Access, Vol.7, pp. 48572-48634, 2019. https://doi.org/10.1109/ACCESS.2019.2909530
- [4] M. Sukop, M. Grytsiv, R. Jánoš, and J. Semjon, “Simple ultrasonic-based localization system for mobile robots,” Appl. Sci., Vol.14, No.9, Article No.3625, 2024. https://doi.org/10.3390/app14093625
- [5] H. Ukida, “Indoor unmanned aerial vehicle navigation system using LED panels and QR codes,” J. Robot. Mechatron., Vol.33, No.2, pp. 242-253, 2021. https://doi.org/10.20965/jrm.2021.p0242
- [6] Y. Higashi and K. Yamazaki, “Autonomous flight using UWB-based positioning system with optical flow sensors in a GPS-denied environment,” J. Robot. Mechatron., Vol.35, No.2, pp. 328-337, 2023. https://doi.org/10.20965/jrm.2023.p0328
- [7] F. Ahmadinejad, J. Bahrami, M. B. Menhaj, and S. S. Ghidary, “Autonomous flight of quadcopters in the presence of ground effect,” 4th Iran. Conf. Signal Process. Intell. Syst., pp. 217-223, 2018. https://doi.org/10.1109/ICSPIS.2018.8700556
- [8] J. Zhang, J. Wang, R. Wen, Y. Ding, and X. Luo, “Control design of quadrotor aircraft based on improved integral backstepping sliding mode,” Asian J. Control, Vol.27, No.1, pp. 427-446, 2025. https://doi.org/10.1002/asjc.3444
- [9] A. Oosedo et al., “Large attitude change flight of a quad tilt rotor unmanned aerial vehicle,” Adv. Robot., Vol.30, No.5, pp. 326-337, 2016. https://doi.org/10.1080/01691864.2015.1134344
- [10] Z. F. He and L. Zhao, “A simple attitude control of quadrotor helicopter based on Ziegler-Nichols rules for tuning PD parameters,” Sci. World J., Vol.2014, Article No.280180, 2014. https://doi.org/10.1155/2014/280180
- [11] H. Liu, Y. Bai, G. Lu, and Y. Zhong, “Robust attitude control of uncertain quadrotors,” IET Control Theory Appl., Vol.7, No.11, pp. 1583-1589, 2013. https://doi.org/10.1049/iet-cta.2012.0964
- [12] C. Trapiello, V. Puig, and B. Morcego, “Position-heading quadrotor control using LPV techniques,” IET Control Theory Appl., Vol.13, No.6, pp. 783-794, 2019. https://doi.org/10.1049/iet-cta.2018.6147
- [13] F. Kong, W. Xu, Y. Cai, and F. Zhang, “Avoiding dynamic small obstacles with onboard sensing and computation on aerial robots,” IEEE Robot. Autom. Lett., Vol.6, No.4, pp. 7869-7876, 2021. https://doi.org/10.1109/LRA.2021.3101877
- [14] W. Gao et al., “Autonomous aerial robot using dual-fisheye cameras,” J. Field Robot., Vol.37, No.4, pp. 497-514, 2020. https://doi.org/10.1002/rob.21946
- [15] C. Zhang et al., “A lightweight and drift-free fusion strategy for drone autonomous and safe navigation,” Drones, Vol.7, No.1, Article No.34, 2023. https://doi.org/10.3390/drones7010034
- [16] T. Abdollahi, S. Salehfard, C.-H. Xiong, and J.-F. Ying, “Simplified fuzzy-Padé controller for attitude control of quadrotor helocopters,” IET Control Theory Appl., Vol.12, No.2, pp. 310-317, 2018. https://doi.org/10.1049/iet-cta.2017.0584
- [17] Y. Tanabe, H. Sugawara, S. Sunada, K. Yonezawa, and H. Tokutake, “Quadrotor drone hovering in ground effect,” J. Robot. Mechatron., Vol.33, No.2, pp. 339-347, 2021. https://doi.org/10.20965/jrm.2021.p0339
- [18] X. Kan et al., “Analysis of ground effect for small-scale UAVs in forward flight,” IEEE Robot. Autom. Lett., Vol.4, No.4, pp. 3860-3867, 2019. https://doi.org/10.1109/LRA.2019.2929993
- [19] C. Powers, D. Mellinger, A. Kushleyev, B. Kothmann, and V. Kumar, “Influence of aerodynamics and proximity effects in quadrotor flight,” Experimental Robotics: 13th Int. Symp. on Experimental Robotics, pp. 289-302, 2013. https://doi.org/10.1007/978-3-319-00065-7_21
- [20] P. Wei, S. N. Chan, S. Lee, and Z. Kong, “Mitigating ground effect on mini quadcopters with model reference adaptive control,” Int. J. Intell. Robot. Appl., Vol.3, No.3, pp. 283-297, 2019. https://doi.org/10.1007/s41315-019-00098-z
- [21] M. S. Triantafyllou and F. S. Hover, “Maneuvering and control of marine vehicles,” Technical Report, Massachusetts Institute of Technology, 2003.
- [22] A. Junaedy et al., “Online topological mapping on a quadcopter with fast growing neural gas,” J. Adv. Comput. Intell. Intell. Inform., Vol.28, No.6, pp. 1354-1366, 2024. https://doi.org/10.20965/jaciii.2024.p1354
- [23] S. M. LaValle, “Rapidly-exploring random trees: A new tool for path planning,” Technical Report, Iowa State University, 1998.
- [24] S. Karaman and E. Frazzoli, “Sampling-based algorithms for optimal motion planning,” Int. J. Robot. Res., Vol.30, No.7, pp. 846-894, 2011. https://doi.org/10.1177/0278364911406761
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.