Paper:
Analysis and Development of a 6-DOF Manipulator Combining a Articulated Manipulator with a Cable-Driven Parallel Platform
Shunichi Sakurai
 and Seiichiro Katsura
and Seiichiro Katsura
Keio University
3-14-1 Hiyoshi, Kohoku-ku, Yokohama, Kanagawa 223-8522, Japan

In the design of robotic manipulators, achieving dexterity within a large workspace along with structural lightness remains a significant challenge. Conventional industrial robots, including serial and parallel robots, suffer from a trade-off between weight and workspace dexterity. In contrast, cable-driven parallel robots (CDPRs) offer excellent lightweight performance and a large workspace. However, their applicability is limited because their workspaces are constrained by surrounding frames. This paper is related to a 6-DOF manipulator that integrates an articulated manipulator with a CDPR. The end effector is a platform whose orientation is directly controlled by four cables, enabling 6-DOF motion with a lightweight structure. The manufactured prototype and architecture, as well as mechanisms involved in the efficient transmission of cable tensile forces, are detailed. The forward kinematics is analyzed, and the numerical solution using the Newton–Raphson method is reviewed. Simulations are conducted to validate the solution and confirm its feasibility. Furthermore, a position control method that incorporates platform statics is introduced. Experimental results confirm the trajectory tracking performance in both translational and orientational motions.
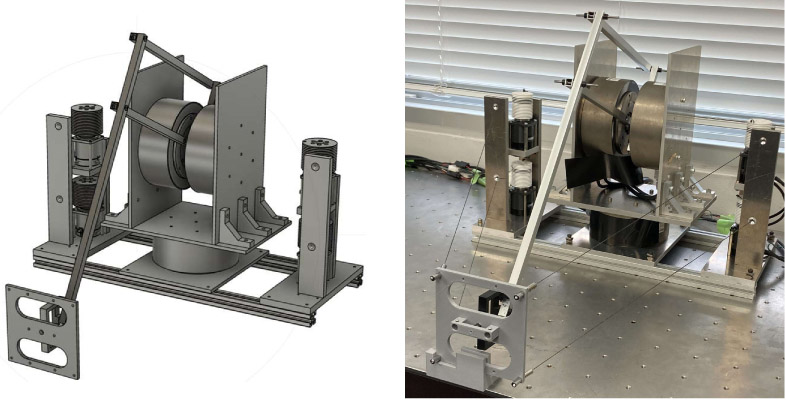
CAD model and a developed prototype
- [1] A. Buerkle, W. Eaton, A. Al-Yacoub, M. Zimmer, P. Kinnell, M. Henshaw, M. Coombes, W.-H. Chen, and N. Lohse, “Towards industrial robots as a service (IRaaS): Flexibility, usability, safety and business models,” Robotics and Computer-Integrated Manufacturing, Vol.81, Article No.102484, 2023. https://doi.org/10.1016/j.rcim.2022.102484
- [2] J.-P. Merlet, “Parallel Robots,” Springer Science & Business Media, 2006.
- [3] Y. Oba and Y. Kakinuma, “Simultaneous tool posture and polishing force control of unknown curved surface using serial-parallel mechanism polishing machine,” Precision Engineering, Vol.49, pp. 24-32, 2017. https://doi.org/10.1016/j.precisioneng.2017.01.006
- [4] A. Takata, “Automatic Design of Serial Linkage Using Virtual Screw Joint,” J. Robot. Mechatron., Vol.36, No.1, pp. 149-157, 2024. https://doi.org/10.20965/jrm.2024.p0149
- [5] R. Mae and R. Kikuuwe, “An Admittance Controller with a Jerk Limiter for Position-Controlled Robots,” J. Robot. Mechatron., Vol.36, No.2, pp. 483-493, 2024. https://doi.org/10.20965/jrm.2024.p0483
- [6] Y. Fang and L.-W. Tsai, “Structure synthesis of a class of 3-DOF rotational parallel manipulators,” IEEE Trans. on Robotics and Automation, Vol.20, Issue 1, pp. 117-121, 2004. https://doi.org/10.1109/TRA.2003.819597
- [7] H. Ishihara, T. Kikuchi, M. Higuchi, Y. Nakazato, and K. Takita, “Development of 3-USR Type Spatial 6-DOF Parallel Mechanism with Large Workspace – Proposal of 3-USR Mechanism and Design of Spherical 5-Link Mechanism to Replace Active Universal Pairs (U) –,” J. Robot. Mechatron., Vol.36, No.5, pp. 1273-1283, 2024. https://doi.org/10.20965/jrm.2024.p1273
- [8] C. Gosselin and L. T. Schreiber, “Kinematically Redundant Spatial Parallel Mechanisms for Singularity Avoidance and Large Orientational Workspace,” IEEE Trans. on Robotics, Vol.32, Issue 2, pp. 286-300, 2016. https://doi.org/10.1109/TRO.2016.2516025
- [9] L. Campos, F. Bourbonnais, I. A. Bonev, and P. Bigras, “Development of a Five-Bar Parallel Robot with Large Workspace,” ASME 2010 Int. Design Engineering Technical Conf. and Computers and Information in Engineering Conf., pp. 917-922, 2010. https://doi.org/10.1115/DETC2010-28962
- [10] Z. Pandilov and V. Dukovski, “Comparison of the Characteristics Between Serial and Parallel Robots,” Acta Technica Corviniensis – Bulletin of Engineering, Vol.7, No.1, pp. 143-160, 2014.
- [11] Y.-J. Kim, “Anthropomorphic Low-Inertia High-Stiffness Manipulator for High-Speed Safe Interaction,” IEEE Trans. on Robotics, Vol.33, Issue 6, pp. 1358-1374, 2017. https://doi.org/10.1109/TRO.2017.2732354
- [12] Y. Huang, Y. Chen, X. Zhang, H. Zhang, C. Song, and J. Ota, “A Novel Cable-Driven 7-DOF Anthropomorphic Manipulator,” IEEE/ASME Trans. on Mechatronics, Vol.26, Issue 4, pp. 2174-2185, 2020. https://doi.org/10.1109/TMECH.2020.3033309
- [13] H. Song, Y.-S. Kim, J. Yoon, S.-H. Yun, J. Seo, and Y.-J. Kim, “Development of Low-Inertia High-Stiffness Manipulator LIMS2 for High-Speed Manipulation of Foldable Objects,” 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 4145-4151, 2018. https://doi.org/10.1109/IROS.2018.8594005
- [14] S. Ma, S. Hirose, and H. Yoshinada, “Design and experiments for a coupled tendon-driven manipulator,” IEEE Control Systems Magazine, Vol.13, Issue 1, pp. 30-36, 1993. https://doi.org/10.1109/37.184790
- [15] Y. Tsumaki, Y. Suzuki, N. Sasaki, E. Obara, and S. Kanazawa, “A 7-Dof Wire-Driven Lightweight Arm with Wide Wrist Motion Range,” 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2018. https://doi.org/10.1109/IROS.2018.8593515
- [16] A. Takata and G. Endo, “Dynamics-Based Control and Path Planning Method for Long-Reach Coupled Tendon-Driven Manipulator,” J. Robot. Mechatron., Vol.36, No.1, pp. 30-38, 2024. https://doi.org/10.20965/jrm.2024.p0030
- [17] M. Miyasaka, M. Haghighipanah, Y. Li, J. Matheson, A. Lewis, and B. Hannaford, “Modeling Cable-Driven Robot with Hysteresis and Cable-Pulley Network Friction,” IEEE/ASME Trans. on Mechatronics, Vol.25, Issue 2, pp. 1095-1104, 2020. https://doi.org/10.1109/TMECH.2020.2973428
- [18] Y. Shizume, A. Takata, and G. Endo, “Enhancement of Control Stability Using Double Pulleys for Coupled Tendon-Driven Long-Reach Manipulator “Super Dragon”,” J. Robot. Mechatron., Vol.36, No.1, pp. 21-29, 2024. https://doi.org/10.20965/jrm.2024.p0021
- [19] C. Gosselin, “Cable-driven parallel mechanisms: State of the art and perspectives,” Mechanical Engineering Reviews, Vol.1, Issue 1, Article No.DSM0004, 2014. https://doi.org/10.1299/mer.2014dsm0004
- [20] K. Kodama, A. Morinaga, and I. Yamamoto, “Adaptive Kinematic Control of Underwater Cable-Driven Parallel Robot,” J. Robot. Mechatron., Vol.35, No.5, pp. 1300-1311, 2023. https://doi.org/10.20965/jrm.2023.p1300
- [21] S. Kawamura, W. Choe, S. Tanaka, and H. Kino, “Development of an Ultrahigh Speed Robot FALCON Using Parallel Wire Drive Systems,” J. of the Robotics Society of Japan, Vol.15, Issue 1, pp. 82-89, 1997 (in Japanese). https://doi.org/10.7210/jrsj.15.82
- [22] S. Sakurai and S. Katsura, “Articulated manipulator with directly cable-driven end effector,” Proc. of JSME Annual Conf. on Robotics and Mechatronics (ROBOMECH), Session ID: 2P1-P07, 2024 (in Japanese). https://doi.org/10.1299/jsmermd.2024.2P1-P07
- [23] S. Sakurai and S. Katsura, “6-DOF Hybrid Cable-Driven Parallel Robot with an Articulated Manipulator,” 2024 IEEE 33rd Int. Symp. on Industrial Electronics (ISIE), 2024. https://doi.org/10.1109/ISIE54533.2024.10595694
- [24] H. Kino, S. Yabe, and S. Kawamura, “A force display system using a serial-link structure driven by a parallel-wire mechanism,” Advanced Robotics, Vol.19, Issue 1, pp. 21-37, 2005. https://doi.org/10.1163/1568553053020287
- [25] A. Klimchik and A. Pashkevich, “Serial vs. quasi-serial manipulators: Comparison analysis of elasto-static behaviors,” Mechanism and Machine Theory, Vol.107, pp. 46-70, 2017. https://doi.org/10.1016/j.mechmachtheory.2016.09.019
- [26] S. K. Mustafa, G. Yang, S. H. Yeo, W. Lin, and C. B. Pham, “Development of a Bio-Inspired Wrist Prosthesis,” 2006 IEEE Conf. on Robotics, Automation and Mechatronics, 2006. https://doi.org/10.1109/RAMECH.2006.252716
- [27] H. S. Kim, “Kinematically Redundant Parallel Haptic Device with Large Workspace,” Int. J. of Advanced Robotic Systems, Vol.9, No.6, Article No.260, 2012. https://doi.org/10.5772/53279
- [28] G. Endo, Y. Wakabayashi, H. Nabae, and K. Suzumori, “Bundled Wire Drive: Proposal and Feasibility Study of a Novel Tendon-Driven Mechanism Using Synthetic Fiber Ropes,” IEEE Robotics and Automation Letters, Vol.4, Issue 2, pp. 966-972, 2019. https://doi.org/10.1109/LRA.2019.2893429
- [29] A. Pott and V. Schmidt, “On the forward kinematics of cable-driven parallel robots,” 2015 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 3182-3187, 2015. https://doi.org/10.1109/IROS.2015.7353818
- [30] J.-P. Merlet, “Direct kinematics of parallel manipulators,” IEEE Trans. on Robotics and Automation, Vol.9, Issue 6, pp. 842-846, 1993. https://doi.org/10.1109/70.265928
- [31] P. Ji and H. Wu, “A closed-form forward kinematics solution for the 6-6P Stewart platform,” IEEE Trans. on Robotics and Automation, Vol.17, Issue 4, pp. 522-526, 2001. https://doi.org/10.1109/70.954766
- [32] O. Didrit, M. Petitot, and E. Walter, “Guaranteed solution of direct kinematic problems for general configurations of parallel manipulators,” IEEE Trans. on Robotics and Automation, Vol.14, Issue 2, pp. 259-266, 1998. https://doi.org/10.1109/70.681244
- [33] N. M. Bajaj, A. J. Spiers, and A. M. Dollar, “State of the Art in Artificial Wrists: A Review of Prosthetic and Robotic Wrist Design,” IEEE Trans. on Robotics, Vol.35, Issue 1, pp. 261-277, 2019. https://doi.org/10.1109/TRO.2018.2865890
- [34] W. Chen, Q. Chen, J. Zhang, and S. Yu, “Forward Kinematics and Workspace Analysis for a 7-DOF Cable-Driven Humanoid Arm,” 2006 IEEE Int. Conf. on Robotics and Biomimetics, pp. 1175-1180, 2006. https://doi.org/10.1109/ROBIO.2006.340095
- [35] K. Ohishi, “Torque-speed regulation of DC motor based on load torque estimation,” Proc. of the IEEJ Int. Power Electronics Conf. (IPEC-TOKYO), pp. 1209-1216, 1983.
- [36] P. Bosscher, A. T. Riechel, and I. Ebert-Uphoff, “Wrench-feasible workspace generation for cable-driven robots,” IEEE Trans. on Robotics, Vol.22, Issue 5, pp. 890-902, 2006. https://doi.org/10.1109/TRO.2006.878967
- [37] M. Gouttefarde, D. Daney, and J.-P. Merlet, “Interval-Analysis-Based Determination of the Wrench-Feasible Workspace of Parallel Cable-Driven Robots,” IEEE Trans. on Robotics, Vol.27, Issue 1, pp. 1-13, 2010. https://doi.org/10.1109/TRO.2010.2090064
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.