Paper:
Human-Inspired Flow-Crossing Navigation for Nonholonomic Mobile Robots in Dynamic Pedestrian Environments
Ryusei Shigemoto†
 , Shohei Saida, and Ryosuke Tasaki
, Shohei Saida, and Ryosuke Tasaki
Department of Mechanical Engineering, Aoyama Gakuin University
5-10-1 Fuchinobe, Chuo-ku, Sagamihara, Kanagawa 252-5258, Japan
†Corresponding author

This paper proposes a human-inspired navigation method that enables nonholonomic mobile robots to traverse dynamic pedestrian flows safely and efficiently. Conventional methods primarily focus on static environments or avoiding individual pedestrians; however, limited attempts have been made to validate robot crossing behavior experimentally within actual crowd scenarios. Therefore, this study implemented crossing navigation based on observed human behavior, specifically positioning robots behind pedestrians during crossing maneuvers. The algorithm developed herein identifies the optimal crossing points within dynamic pedestrian flows, considering robot nonholonomic constraints to ensure safety and efficiency. Additionally, potential field methods generate robot trajectories toward the identified crossing points, and pure pursuit control facilitates smooth trajectory tracking. Multiple simulations confirmed significant reductions in arrival time and path length compared with the conventional social-force-based method under uniform and nonuniform pedestrian flow conditions. Furthermore, pedestrian disturbances decreased, stabilizing the average walking velocities. In real-world experiments conducted in a 6 m × 6 m environment, robots successfully traversed pedestrian gaps without disrupting pedestrian flow. Moreover, pedestrians voluntarily yielded paths to the robot, indicating the importance of incorporating human social behaviors into robotic navigation planning. Thus, multiple simulation and experimental results demonstrated that the proposed method effectively balances safety and efficiency in robotic path planning through crowds.
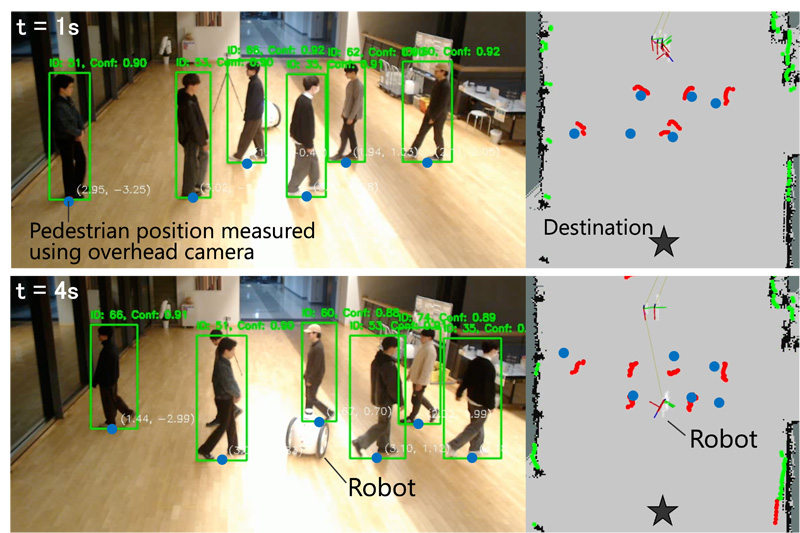
Robot crossing in dynamic pedestrian flow
- [1] D. Helbing, P. Molnár, I. J. Farkas, and K. Bolay, “Self-organizing pedestrian movement,” Environment and planning B: Planning and Design, Vol.28, No.3, pp. 361-383, 2001. https://doi.org/10.1068/b2697
- [2] D. Helbing, L. Buzna, A. Johansson, and T. Werner, “Self-organized pedestrian crowd dynamics: Experiments, simulations, and design solutions,” Transportation Science, Vol.39, No.1, pp. 1-24, 2005. https://doi.org/10.1287/trsc.1040.0108
- [3] E. W. Dijkstra, “A note on two problems in connexion with graphs,” Numerische Mathematik, Vol.1, pp. 269-271, 1959.
- [4] J. Pearl, “Heuristics intelligent search strategies for computer problem solving,” Addison-Wesley, 1984.
- [5] O. Kathib, “Real-time obstacle avoidance for manipulators and mobile robots,” Proc. 1985 IEEE Int. Conf. on Robotics and Automation, Vol.2, pp. 500-505, 1985. https://doi.org/10.1109/ROBOT.1985.1087247
- [6] D. Fox, W. Burgard, and S. Thrun, “The dynamic window approach to collision avoidance,” IEEE Robotics & Automation Magazine, Vol.4, No.1, pp. 23-33, 1997. https://doi.org/10.1109/100.580977
- [7] S. M. LaValle, “Rapidly-exploring random trees: A new tool for path planning,” Computer Science Dept. Oct., Vol.98, No.11, 1998.
- [8] S. Thrun, M. Beetz, M. Bennewitz, W. Burgard, A. B. Cremers, F. Dellaert, D. Fox, D. Haehnel, C. Rosenberg, N. Roy, J. Schulte, and D. Schulz, “Probabilistic algorithms and the interactive museum tour-guide robot Minerva,” The Int. J. of Robotics Research, Vol.19, No.11, pp. 972-999, 2000. https://doi.org/10.1177/02783640022067922
- [9] W. Burgard, A. B. Cremers, D. Fox, D. Hähnel, G. Lakemeyer, D. Schulz, W. Steiner, and S. Thrun, “Experiences with an interactive museum tour-guide robot,” Artificial Intelligence, Vol.114, Nos.1-2, pp. 3-55, 1999. https://doi.org/10.1016/S0004-3702(99)00070-3
- [10] Y. Hosoda, K. Yamamoto, R. Ichinose, S. Egawa, J. Tamamoto, K. Tsubouchi, and S. Yuta, “Collision-avoidance algorithm for human-symbiotic robot,” ICCAS 2010, pp. 557-561, 2010. https://doi.org/10.1109/ICCAS.2010.5669933
- [11] N. E. Du Toit and J. W. Burdick, “Robot motion planning in dynamic, uncertain environments,” IEEE Trans. on Robotics, Vol.28, No.1, pp. 101-115, 2012. https://doi.org/10.1109/TRO.2011.2166435
- [12] P. Trautman and A. Krause, “Unfreezing the robot: Navigation in dense, interacting crowds,” 2010 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 797-803, 2010. https://doi.org/10.1109/IROS.2010.5654369
- [13] P. Trautman, J. Ma, R. M. Murray, and A. Krause, “Robot navigation in dense human crowds: Statistical models and experimental studies of human–robot cooperation,” The Int. J. of Robotics Research, Vol.34, No.3, pp. 335-356, 2015. https://doi.org/10.1177/0278364914557874
- [14] P. Trautman, J. Ma, R. M. Murray, and A. Krause, “Robot navigation in dense human crowds: The case for cooperation,” 2013 IEEE Int. Conf. on Robotics and Automation, pp. 2153-2160, 2013. https://doi.org/10.1109/ICRA.2013.6630866
- [15] Y. F. Chen, M. Everett, M. Liu, and J. P. How, “Socially aware motion planning with deep reinforcement learning,” 2017 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 1343-1350, 2017. https://doi.org/10.1109/IROS.2017.8202312
- [16] G. Ferrer, A. G. Zulueta, F. H. Cotarelo, and A. Sanfeliu, “Robot social-aware navigation framework to accompany people walking side-by-side,” Autonomous Robots, Vol.41, No.4, pp. 775-793, 2017. https://doi.org/10.1007/s10514-016-9584-y
- [17] A. Bera, T. Randhavane, R. Prinja, and D. Manocha, “Sociosense: Robot navigation amongst pedestrians with social and psychological constraints,” 2017 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 7018-7025, 2017. https://doi.org/10.1109/IROS.2017.8206628
- [18] C. Chen, Y. Liu, S. Kreiss, and A. Alahi, “Crowd-robot interaction: Crowd-aware robot navigation with attention-based deep reinforcement learning,” 2019 Int. Conf. on Robotics and Automation (ICRA), pp. 6015-6022, 2019. https://doi.org/10.1109/ICRA.2019.8794134
- [19] S. Liu, P. Chang, Z. Huang, N. Chakraborty, K. Hong, W. Liang, D. L. McPherson, J. Geng, and K. Driggs-Campbell, “Intention aware robot crowd navigation with attention-based interaction graph,” 2023 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 12015-12021, 2023. https://doi.org/10.1109/ICRA48891.2023.10160660
- [20] K. Aghabayk, O. Ejtemai, M. Sarvi, and A. Sobhani, “Understanding pedestrian crowd merging behavior,” Transportation Research Procedia, Vol.2, pp. 768-773, 2014. https://doi.org/10.1016/j.trpro.2014.09.086
- [21] K. Rio and W. H. Warren, “A data-driven model of pedestrian following and emergent crowd behavior,” U. Weidmann, U. Kirsch, and M. Schreckenberg (Eds.), “Pedestrian and Evacuation Dynamics 2012,” pp. 561-574, 2013. https://doi.org/10.1007/978-3-319-02447-9_47
- [22] P. Mullick, S. Fontaine, C. Appert-Rolland, A. Olivier, W. H. Warren, and J. Pettré, “Analysis of emergent patterns in crossing flows of pedestrians reveals an invariant of ‘stripe’ formation in human data,” PLoS Computational Biology, Vol.18, No.6, Article No.e1010210, 2022. https://doi.org/10.1371/journal.pcbi.1010210
- [23] R. Bhaskara, H. Viswanath, and A. Bera, “Trajectory prediction for robot navigation using flow-guided Markov neural operator,” 2024 IEEE Int. Conf. on Robotics and Automation, pp. 15209-15216, 2024. https://doi.org/10.1109/ICRA57147.2024.10611154
- [24] D. Dugas, K. Cai, O. Andersson, N. Lawrance, R. Siegwart, and J. J. Chung, “FlowBot: Flow-based Modeling for Robot Navigation,” 2022 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 8799-8805, 2022. https://doi.org/10.1109/IROS47612.2022.9981407
- [25] X. Yao, J. Zhang, and J. Oh, “Following social groups: Socially compliant autonomous navigation in dense crowds,” arXiv:1911.12063, 2019. https://doi.org/10.48550/arXiv.1911.12063
- [26] Y. Du, N. J. Hetherington, C. L. Oon, W. P. Chan, C. P. Quintero, E. Croft, and H. M. Vander Loos, “Group surfing: A pedestrian-based approach to sidewalk robot navigation,” 2019 Int. Conf. on Robotics and Automation (ICRA), pp. 6518-6524, 2019. https://doi.org/10.1109/ICRA.2019.8793608
- [27] R. Shigemoto and R. Tasaki, “Mobile robot navigation based on pedestrian flow model considering human unsteady dynamic behavior,” Proc. of the 20th Int. Conf. on Informatics in Control, Automation and Robotics (ICINCO 2023), pp. 281-284, 2023. https://doi.org/10.5220/0012211900003543
- [28] R. Shigemoto and R. Tasaki, “Motion planning of a human-aware mobile robot merging into dynamic pedestrian flow,” 2024 9th Int. Conf. on Control and Robotics Engineering (ICCRE), pp. 173-176, 2024. https://doi.org/10.1109/ICCRE61448.2024.10589787
- [29] J. J. Fruin, “Pedestrian plan and design,” Metropolitan Association of Urban Designers and Environmental Planners, 1971.
- [30] D. Fox, “Adapting the sample size in particle filters through KLD-sampling,” Int. J. of Robotics Research, Vol.22, No.12, pp. 985-1004, 2003. https://doi.org/10.1177/0278364903022012001
- [31] G. Grisetti, C. Stachniss, and W. Burgard, “Improved techniques for grid mapping with Rao-Blackwellized particle filters,” IEEE Trans. on Robotics, Vol.23, No.1, pp. 34-46, 2007. https://doi.org/10.1109/TRO.2006.889486
- [32] B. Paden, M. Čáp, S. Z. Yong, D. Yershov, and E. Frazzoli, “A survey of motion planning and control techniques for self-driving urban vehicles,” IEEE Trans. on Intelligent Vehicles, Vol.1, No.1, pp. 33-55, 2016. https://doi.org/10.1109/TIV.2016.2578706
- [33] M. Moussäid, D. Helbing, and G. Theraulaz, “How simple rules determine pedestrian behavior and crowd disasters,” Proc. of the National Academy of Sciences, Vol.108, No.17, pp. 6884-6888, 2011. https://doi.org/10.1073/pnas.1016507108
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.