Paper:
Inducibility—Quantitative Measure of Interaction Between Pedestrians—
Hiroyuki Okuda
 , Kentaro Sugiura, and Tatsuya Suzuki
, Kentaro Sugiura, and Tatsuya Suzuki
Nagoya University
Furo-cho, Chikusa-ku, Nagoya, Aichi 464-8603, Japan

As autonomous mobile robots (AMRs) are increasingly introduced into diverse environments, it is crucial that they interact smoothly and naturally with nearby pedestrians. To allow this, AMRs are expected to communicate and behave in a manner similar to interactions between humans. This study addresses pedestrian-pedestrian passing behavior and presents a novel quantitative index, termed the inducibility measure, that captures the extent to which a person’s actions can affect the behavior of those around them. Two types of inducibility measures are proposed: one derived from the sensitivity of the decision-making process, and the other from the controllability Gramian of a state-space representation of a closed-loop system representing interactive behavior. These measures were analyzed using a mathematical model of pedestrian behavior developed from actual observational data on pedestrian interactions. The proposed indices are intended to support the design and evaluation of AMR behavior, particularly in scenarios involving close interactions with humans.
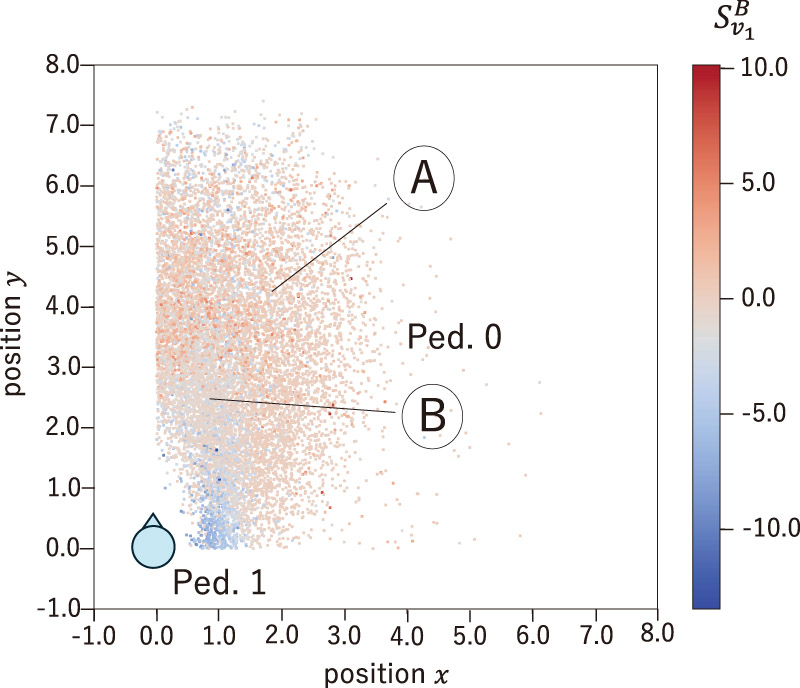
Inducibility map for pedestrian"s decision
- [1] N. Boysen, S. Fedtke, and S. Schwerdfeger, “Last-mile delivery concepts: A survey from an operational research perspective,” OR Spectrum, Vol.43, No.1, pp. 1-58, 2021. https://doi.org/10.1007/s00291-020-00607-8
- [2] A. Singhal et al., “Managing a fleet of autonomous mobile robots (AMR) using cloud robotics platform,” 2017 European Conf. on Mobile Robots, 2017. https://doi.org/10.1109/ECMR.2017.8098721
- [3] H.-Y. Ryu et al., “Development of an autonomous driving smart wheelchair for the physically weak,” Applied Sciences, Vol.12, No.1, Article No.377, 2021. https://doi.org/10.3390/app12010377
- [4] P. Trautman and A. Krause, “Unfreezing the robot: Navigation in dense, interacting crowds,” 2010 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 797-803, 2010. https://doi.org/10.1109/IROS.2010.5654369
- [5] Z. Zhou et al., “Robot navigation in a crowd by integrating deep reinforcement learning and online planning,” Applied Intelligence, Vol.52, No.13, pp. 15600-15616, 2022. https://doi.org/10.1007/s10489-022-03191-2
- [6] K. Miyamoto, N. Watanabe, and Y. Takefuji, “Adaptation to other agent’s behavior using meta-strategy learning by collision avoidance simulation,” Applied Sciences, Vol.11, No.4, Article No.1786, 2021. https://doi.org/10.3390/app11041786
- [7] B. D. Eldridge and A. A. Maciejewski, “Using genetic algorithms to optimize social robot behavior for improved pedestrian flow,” 2005 IEEE Int. Conf. on Systems, Man and Cybernetics, Vol.1, pp. 524-529, 2005. https://doi.org/10.1109/ICSMC.2005.1571199
- [8] D. Helbing and P. Molnár, “Social force model for pedestrian dynamics,” Physical Review E, Vol.51, No.5, pp. 4282-4286, 1995. https://doi.org/10.1103/PhysRevE.51.4282
- [9] W. Wu, M. Chen, J. Li, B. Liu, and X. Zheng, “An extended social force model via pedestrian heterogeneity affecting the self-driven force,” IEEE Trans. on Intelligent Transportation Systems, Vol.23, No.7, pp. 7974-7986, 2021. https://doi.org/10.1109/TITS.2021.3074914
- [10] B. F. de Brito, H. Zhu, W. Pan, and J. Alonso-Mora, “Social-VRNN: One-shot multi-modal trajectory prediction for interacting pedestrians,” Proc. of the 2020 Conf. on Robot Learning, pp. 862-872, 2021.
- [11] S. Eiffert et al., “Probabilistic crowd GAN: Multimodal pedestrian trajectory prediction using a graph vehicle-pedestrian attention network,” IEEE Robotics and Automation Letters, Vol.5, No.4, pp. 5026-5033, 2020. https://doi.org/10.1109/LRA.2020.3004324
- [12] S. Bansal, A. Bajcsy, E. Ratner, A. D. Dragan, and C. J. Tomlin, “A Hamilton-Jacobi reachability-based framework for predicting and analyzing human motion for safe planning,” 2020 IEEE Int. Conf. on Robotics and Automation, pp. 7149-7155, 2020. https://doi.org/10.1109/ICRA40945.2020.9197257
- [13] R. Karim, S. Weiguo, A. R. Rasa, M. A. Khan, and N. D. Bilintoh, “Comparative study of multidirectional pedestrian flows: Insights and dynamics,” Physica A: Statistical Mechanics and its Applications, Vol.652, Article No.130053, 2024. https://doi.org/10.1016/j.physa.2024.130053
- [14] L. Lévêque, M. Ranchet, J. Deniel, J.-C. Bornard, and T. Bellet, “Where do pedestrians look when crossing? A state of the art of the eye-tracking studies,” IEEE Access, Vol.8, pp. 164833-164843, 2020. https://doi.org/10.1109/ACCESS.2020.3021208
- [15] H. Jiang, E. A. Croft, and M. G. Burke, “Social cue detection and analysis using transfer entropy,” Proc. of the 2024 ACM/IEEE Int. Conf. on Human-Robot Interaction, pp. 323-332, 2024. https://doi.org/10.1145/3610977.3634933
- [16] H. Okuda, T. Suzuki, K. Harada, S. Saigo, and S. Inoue, “Quantitative driver acceptance modeling for merging car at highway junction and its application to the design of merging behavior control,” IEEE Trans. on Intelligent Transportation Systems, Vol.22, No.1, pp. 329-340, 2021. https://doi.org/10.1109/TITS.2019.2957391
- [17] A. Muraleedharan, H. Okuda, and T. Suzuki, “Pedestrian-aware model predictive controller for design of considerate autonomous driving,” Trans. of the Society of Instrument and Control Engineers, Vol.59, No.11, pp. 472-483, 2023 (in Japanese). https://doi.org/10.9746/sicetr.59.472
- [18] K. Suzuki, T. Yamaguchi, H. Okuda, and T. Suzuki, “Indication of interaction plans based on model predictive interaction control: Cooperation between AMRs and pedestrians using eHMI,” 61st Annual Conf. of the Society of Instrument and Control Engineers, pp. 1232-1237, 2022. https://doi.org/10.23919/SICE56594.2022.9905833
- [19] H. Okuda, N. Ikami, T. Suzuki, Y. Tazaki, and K. Takeda, “Modeling and analysis of driving behavior based on a probability-weighted ARX model,” IEEE Trans. on Intelligent Transportation Systems, Vol.14, No.1, pp. 98-112, 2013. https://doi.org/10.1109/TITS.2012.2207893
- [20] K. Sugiura, M. Aoki, K. Kuroda, H. Okuda, and T. Suzuki, “Evaluation of controllability of interaction between pedestrian and autonomous mobile robot in shared mobility space,” Proc. of the 20th Int. Conf. on Informatics in Control, Automation and Robotics, Vol.2, pp. 249-257, 2023. https://doi.org/10.5220/0012177500003543
- [21] K. Uchida, N. Kodama, H. Okuda, K. Kuroda, and T. Suzuki, “Observation and modeling of decision-making of pedestrian with interactions at X-crossing,” 62nd Annual Conf. of the Society of Instrument and Control Engineers, pp. 850-855, 2023. https://doi.org/10.23919/SICE59929.2023.10354219
- [22] T. Watanabe et al., “Analysis and modeling of traffic participants considering interactions at intersections without traffic signals,” 2023 IEEE/SICE Int. Symp. on System Integration, 2023. https://doi.org/10.1109/SII55687.2023.10039251
- [23] J. Zhao, J. O. Malenje, Y. Tang, and Y. Han, “Gap acceptance probability model for pedestrians at unsignalized mid-block crosswalks based on logistic regression,” Accident Analysis & Prevention, Vol.129, pp. 76-83, 2019. https://doi.org/10.1016/j.aap.2019.05.012
- [24] C.-Y. J. Peng, K. L. Lee, and G. M. Ingersoll, “An introduction to logistic regression analysis and reporting,” The J. of Educational Research, Vol.96, No.1, pp. 3-14, 2002. https://doi.org/10.1080/00220670209598786
- [25] S. Zhao and F. Pasqualetti, “Discrete-time dynamical networks with diagonal controllability Gramian,” IFAC-PapersOnLine, Vol.50, No.1, pp. 8297-8302, 2017. https://doi.org/10.1016/j.ifacol.2017.08.1407
- [26] S. Roy and M. Xue, “Controllability-Gramian submatrices for a network consensus model,” Systems & Control Letters, Vol.136, Article No.104575, 2020. https://doi.org/10.1016/j.sysconle.2019.104575
- [27] M. Imran and A. Ghafoor, “Model reduction of descriptor systems using frequency limited Gramians,” J. of the Franklin Institute, Vol.352, No.1, pp. 33-51, 2015. https://doi.org/10.1016/j.jfranklin.2014.10.013
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.