Paper:
A Study on Driver’s Deceleration Prediction Accuracy of ELM Model Depending on the Amount of Learning Data
Yasuki Fukumoto*,**,†, Shiori Hamada**, Atsuhiko Miyazaki**, Fuguo Xu**
 , Kazuma Sekiguchi**
, and Kenichiro Nonaka**
, Kazuma Sekiguchi**
, and Kenichiro Nonaka**
*Nissan Motor Co., Ltd.
560-2 Okatsukoku, Atsugi, Kanagawa 243-0192, Japan
**Tokyo City University
1-28-1 Tamazutsumi, Setagaya-ku, Tokyo 158-8557, Japan
†Corresponding author

To make advanced driver assistance systems (ADASs) more accessible, it is essential to ensure their response is more approximated to the driver’s operating behavior. In this study, we proposed a method to adapt the ADAS to the driver’s behavior with high accuracy using an extreme learning machine (ELM) model, which enabled fast learning of the vehicle response. The learning object was the driver’s vehicle velocity control during deceleration to predict the future velocity. The future velocity could be used for model predictive control (MPC) of the reference velocity to achieve the desired vehicle behavior and guarantee safety and efficiency. The proposed ELM model consisted of a series of serially connected velocity predictors that covered multiple time step horizons for MPC. We developed a system where the ELM model learned the driver’s deceleration trajectory and the effectiveness of this system was assessed by applying it to an actual test vehicle. The results showed that the proposed ELM model could predict the velocity in real-time.
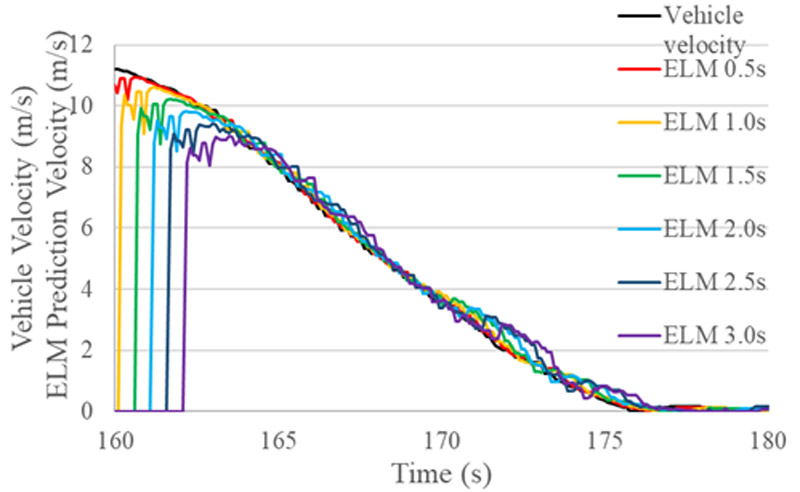
Prediction results of ELM in an actual vehicle
- [1] M. Picone, A. Errichiello, and A. Cartenì, “How often are ADAS used? Results of a car drivers’ survey,” WSEAS Trans. on Systems, Vol.22, pp. 566-577, 2023. https://doi.org/10.37394/23202.2023.22.57
- [2] T. Yoshimoto and T. Fukao, “Adaptive cruise control considering driver’s characteristics,” Trans. of the JSME, Vol.84, No.868, 2018 (in Japanese). https://doi.org/10.1299/transjsme.18-00164
- [3] Y. He, B. Ciuffo, Q. Zhou, M. Makridis, K. Mattas, J. Li, Z. Li, F. Yan, and H. Xu, “Adaptive cruise control strategies implemented on experimental vehicles: A review,” IFAC-Papers Online, Vol.52, No.5, pp. 21-27, 2019. https://doi.org/10.1016/j.ifacol.2019.09.004
- [4] B. Hegde, M. O’keefe, S. Muldoon, J. Gonder, and C.-F. Chang, “Real-world driving features for identifying intelligent driver model parameters,” SAE International, 2021. https://doi.org/10.4271/2021-01-0436
- [5] J. Kim and H. S. Mahmassani, “Correlated parameters in driving behavior models: Car-following example and implications for traffic microsimulation,” Transportation Research Record, Vol.2249, No.1, pp. 62-77, 2011. https://doi.org/10.3141/2249-09
- [6] M. Hiramatsu, Y. Ito, M. Yamazaki, and T. Sunda, “Method of driving style adaptation for automated vehicle (Second report) – Study of modeling method for brake timing at intersection –,” Trans. of Society of Automotive Engineers of Japan, 2020, Vol.51, No.3, pp. 460-465, 2020 (in Japanese). https://doi.org/10.11351/jsaeronbun.51.460
- [7] X. Chen, J. Sun, Z. Ma, J. Sun, and Z. Zheng, “Investigating the long- and short-term driving characteristics and incorporating them into car-following models,” Transportation Research Part C: Emerging Technologies, Vol.117, 2020. https://doi.org/10.1016/j.trc.2020.102698
- [8] M. Natarajan, K. Akash, and T. Misu, “Toward adaptive driving styles for automated driving with users’ trust and preferences,” ACM/IEEE Int. Conf. on Human-Robot Interaction, pp. 940-944, 2022. https://doi.org/10.1109/HRI53351.2022.9889313
- [9] T. Takahama and D. Akasaka, “Model Predictive Control Approach to Design Practical Adaptive Cruise Control for Traffic Jam,” Int. J. of Automotive Engineering, Vol.9, No.3, pp. 99-104, 2018. https://doi.org/10.20485/jsaeijae.9.3_99
- [10] Y. Mizushima, I. Okawa, and K. Nonaka, “Model Predictive Control for Autonomous Vehicles with Speed Profile Shaping,” IFAC-Papers Online, Vol.52, No.8, pp. 31-36, 2019. https://doi.org/10.1016/j.ifacol.2019.08.044
- [11] A. Vaughan and S. V. Bohac, “Real-time, adaptive machine learning for non-stationary, near chaotic gasoline engine combustion time series,” Neural Networks, Vol.70, pp. 18-26, 2015. https://doi.org/10.1016/j.neunet.2015.04.007
- [12] J. Kabzan, L. Hewing, A. Liniger, and M. N. Zeilinger, “Learning-based model predictive control for autonomous racing,” IEEE Robotics and Automation Letters, Vol.4, No.4, pp. 3363-3370, 2019. https://doi.org/10.1109/LRA.2019.2926677
- [13] Y. Zhang, J. Boedecker, C. Li, and G. Zhou, “Incorporating Recurrent Reinforcement Learning into Model Predictive Control for Adaptive Control in Autonomous Driving,” arXiv:2301.13313, 2023. https://arxiv.org/abs/2301.13313
- [14] X. Tang, T. Jia, X. Hu, Y. Huang, Z. Deng, and H. Pu, “Naturalistic data-driven predictive energy management for plug-in hybrid electric vehicles,” IEEE Trans. on Transportation Electrification, Vol.7, No.2, pp. 497-508, 2021. https://doi.org/10.1109/TTE.2020.3025352
- [15] B. Gao, K. Cai, T. Qu, Y. Hu, and H. Chen, “Personalized adaptive cruise control based on online driving style recognition technology and model predictive control,” IEEE Trans. on Vehicular Technology, Vol.69, No.11, pp. 12482-12496, 2020. https://doi.org/10.1109/TVT.2020.3020335
- [16] S. di Cairano, D. Bernardini, A. Bemporad, and I. V. Kolmanovsky, “Stochastic MPC with learning for driver-predictive vehicle control and its application to HEV energy management,” IEEE Trans. on Control Systems Technology, Vol.22, No.3, pp. 1018-1031, 2014. https://doi.org/10.1109/TCST.2013.2272179
- [17] A. Norouzi, H. Heidarifar, H. Borhan, M. Shahbakhti, and C. R. Koch, “Integrating machine learning and model predictive control for automotive applications: A review and future directions,” Engineering Applications of Artificial Intelligence, Vol.120, 2023. https://doi.org/10.1016/j.engappai.2023.105878
- [18] J. C. F. De Winter, C. M. Gorter, W. J. Schakel, and B. van Arem, “Pleasure in using adaptive cruise control: A questionnaire study in the Netherlands,” Traffic Injury Prevention, Vol.18, No.2, pp. 216-224, 2017. https://doi.org/10.1080/15389588.2016.1220001
- [19] G. B. Huang, Q. Y. Zhu, and C. K. Siew, “Extreme learning machine: Theory and applications,” Neurocomputing, Vol.70, Nos.1-3, pp. 489-501, 2006. https://doi.org/10.1016/j.neucom.2005.12.126
- [20] J. Zhang, F. Xu, Y. Zhang, and T. Shen, “ELM-based driver torque demand prediction and real-time optimal energy management strategy for HEVs,” Neural Computing and Applications, Vol.32, No.18, pp. 14411-14429, 2020. https://doi.org/10.1007/s00521-019-04240-7
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.