Paper:
Omnidirectional Mobile Vehicle Using Belt-Driven Seamless Active Omni Wheel
Tatsuro Terakawa*
 , Yusuke Kinoshita*, Toshiki Watanabe*, Mitsuru Sakamoto**, and Masaharu Komori*
, Yusuke Kinoshita*, Toshiki Watanabe*, Mitsuru Sakamoto**, and Masaharu Komori*
*Department of Mechanical Engineering and Science, Kyoto University
Kyoto daigaku-katsura, Nishikyo-ku, Kyoto 615-8540, Japan
**Issi Corporation
1-1 Yunohara Oharagadani, Nishibetsuin-cho, Kameoka, Kyoto 621-0124, Japan

This paper presents the development and evaluation of an omnidirectional mobile vehicle using a novel active omni wheel (AOW) mechanism. An AOW is a wheel mechanism capable of moving in an arbitrary direction by driving the wheel’s main body and outer rollers. The previous design features barrel-shaped outer rollers, which enables a seamless circumference and reduces vibration. However, it experiences slippage owing to friction-based transmission. To address this issue, a new AOW design incorporating positive drive mechanisms that utilize toothed belts is proposed to ensure non-slipping transmission and enhance the movement accuracy. The dynamic performance of a four-wheeled vehicle equipped with two AOWs and two passive omni wheels is evaluated by comparing the two configurations. The line-symmetric wheel layout with its center of gravity (COG) positioned near the AOWs exhibits superior performance in terms of maximum acceleration without wheel slippage. The point-symmetric wheel layout demonstrates a marginally lower performance but remains effective under varying COG positions. A prototype vehicle is developed and tested, verifying the effectiveness of the AOW in achieving omnidirectional movement. Furthermore, a control system is designed to manage actuation redundancy, which can result in load concentration on a single wheel. The proposed controller utilizes a PI control method to provide feedback based on the deviation of the wheel torque from its permissible value. The experimental results validate the capability of the proposed controller to ensure a balanced torque distribution between the AOWs.
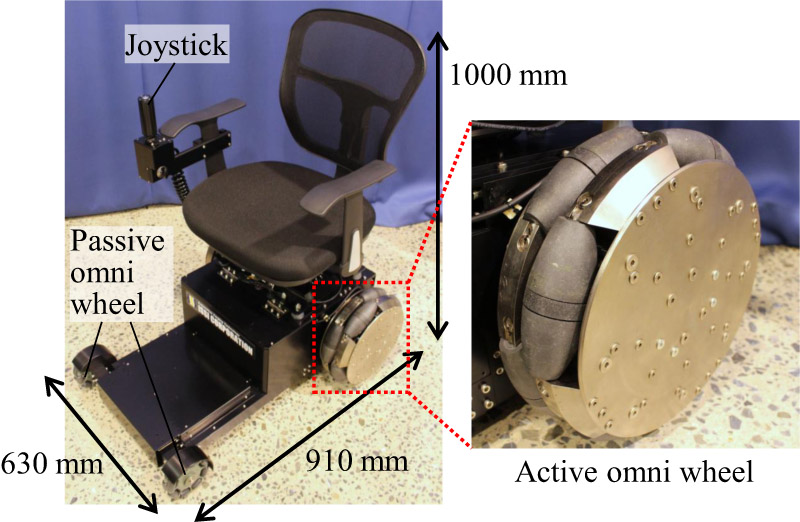
Omnidirectional vehicle and belt-driven AOWs
- [1] K. Terashima, H. Kitagawa, T. Miyoshi, S. Kitamura, and J. Urbano, “Neuro-Fuzzy Control of Power-Assist Omnidirectional Wheelchair Using Human-Friendly Touch Panel,” J. Robot. Mechatron., Vol.21, No.3, pp. 427-434, 2009. https://doi.org/10.20965/jrm.2009.p0427
- [2] T. Ogino, M. Tomono, T. Akimoto, and A. Matsumoto, “Human Following by an Omnidirectional Mobile Robot Using Maps Built From Laser Range-Finder Measurement,” J. Robot. Mechatron., Vol.22, No.1, pp. 28-35, 2010. https://doi.org/10.20965/jrm.2010.p0028
- [3] S.-H. Yun, J. Park, J. Seo, and Y.-J. Kim, “Development of an Agile Omnidirectional Mobile Robot with GRF Compensated Wheel-leg Mechanisms for Human Environments,” IEEE Robotics and Automation Letters, Vol.6, Issue 4, pp. 8301-8308, 2021. https://doi.org/10.1109/LRA.2021.3098954
- [4] C. Ye, Y. Zhang, S. Yu, and D. Li, “Development of an Omni-directional Lower Limb Rehabilitation Mobile Robot,” Proc. of IEEE Int. Conf. on Mechatronics and Automation (ICMA), pp. 2045-2050, 2023. https://doi.org/10.1109/ICMA57826.2023.10215810
- [5] M. Yazdanpour, V. Tran, and S. Tayabee, “Autonomous Omnidirectional Mobile Robot for Indoor Navigation,” Proc. of 24th IEEE Int. Conf. on Electro Information Technology (eIT), pp. 53-57, 2004. https://doi.org/10.1109/eIT60633.2024.10609938
- [6] V. B. Coch, L. S. Correa, G. A. Souza, L. P. A. Lopes, M. B. O. Pinto, and V. M. Oliveira, “Modeling and Control of an Omnidirectional Mobile Robot for Applications in Gait Learning,” Proc. of 22nd IEEE Int. Conf. on Industrial Informatics, 2024. https://doi.org/10.1109/INDIN58382.2024.10774261
- [7] K. Kato and M. Wada, “Modeling and Mechanical Design of an Active-Caster Omnidirectional Mechanism with a Ball Transmission,” J. Robot. Mechatron., Vol.30, No.6, pp. 910-919, 2018. https://doi.org/10.20965/jrm.2018.p0910
- [8] M. Wada, “A 4WD Omnidirectional Wheelchair with Enhanced Step Climbing Capability,” J. Robot. Mechatron., Vol.20, No.6, pp. 846-853, 2008. https://doi.org/10.20965/jrm.2008.p0846
- [9] M. Wada, “Omnidirectional and Holonomic Mobile Platform with Four-Wheel-Drive Mechanism for Wheelchairs,” J. Robot. Mechatron., Vol.19, No.3, pp. 264-271, 2007. https://doi.org/10.20965/jrm.2007.p0264
- [10] G. Lin, T. Terakawa, K. Shinno, T. Inoue, and M. Komori, “RoMop: A New Type of Wheeled Mobile Platform Based on Rotating Locomotion,” IEEE/ASME Trans. on Mechatronics, Vol.29, Issue 4, pp. 2510-2521, 2024. https://doi.org/10.1109/tmech.2023.3333016
- [11] N. Li, F. Duan, and C. Zhu, “The Development of an Omnidirectional Mobile Robot Based on Hub Motor,” Proc. of 6th Int. Conf. on Control, Robotics and Cybernetics (CRC), 2021. https://doi.org/10.1109/CRC52766.2021.9620166
- [12] T. Nakayama and M. Wada, “Study on an Add-on Type Electric Wheelchair Using Active Caster with the Differential Mechanism,” J. Robot. Mechatron., Vol.35, No.1, pp. 99-112, 2023. https://doi.org/10.20965/jrm.2023.p0099
- [13] T. Terakawa, M. Komori, K. Matsuda, and S. Mikami, “A Novel Omnidirectional Mobile Robot with Wheels Connected by Passive Sliding Joints,” IEEE/ASME Trans. on Mechatronics, Vol.23, Issue 4, pp. 1716-1727, 2018. https://doi.org/10.1109/TMECH.2018.2842259
- [14] T. Terakawa, M. Komori, and K. Fujimoto, “Control of an Omnidirectional Mobile Robot with Wheels Connected by Passive Sliding Joints,” J. of Advanced Mechanical Design, Systems, and Manufacturing, Vol.13, Issue 1, Article No.JAMDSM0006, 2019. https://doi.org/10.1299/jamdsm.2019jamdsm0006
- [15] H. Xu, T. Terakawa, and M. Komori, “Trajectory Tracking Control of Slidable-Wheel Omnidirectional Mobile Robot Based on Linear Model Predictive Control,” J. of Advanced Mechanical Design, Systems, and Manufacturing, Vol.19, Issue 1, Article No.JAMDSM0011, 2025. https://doi.org/10.1299/jamdsm.2025jamdsm0011
- [16] H. Xu, T. Terakawa, K. Ohyama, K. Shinno, and M. Komori, “Novel Omnidirectional Mobile Robot with Slidable Base,” J. of Advanced Mechanical Design, Systems, and Manufacturing, Vol.18, Issue 5, Article No.JAMDSM0063, 2024. https://doi.org/10.1299/jamdsm.2024jamdsm0063
- [17] K. Tadakuma, R. Tadakuma, and S. Hirose, “Mechanical Design of VmaxCarrier2: Omnidirectional Mobile Robot with Function of Step-Climbing,” J. Robot. Mechatron., Vol.17, No.2, pp. 198-207, 2005. https://doi.org/10.20965/jrm.2005.p0198
- [18] T. Maeda and H. Ando, “Omnidirectional Mobility Following Through Trochoidal Trajectory,” J. Robot. Mechatron., Vol.31, No.4, pp. 567-582, 2019. https://doi.org/10.20965/jrm.2019.p0567
- [19] K. Tadakuma, R. Tadakuma, and J. Berengueres, “Tetrahedral Mobile Robot with Spherical Omnidirectional Wheel,” J. Robot. Mechatron., Vol.20, No.1, pp. 125-134, 2008. https://doi.org/10.20965/jrm.2008.p0125
- [20] S. Bu, L. Yan, X. Gao, G. Wang, P. Zhao, and I.-M. Chen, “Design and Motion Control of Spherical Robot with Built-In Four-Wheel Omnidirectional Mobile Platform,” IEEE Trans. on Instrumentation and Measurement, Vol.72, Article No.7502910, 2023. https://doi.org/10.1109/TIM.2023.3267524
- [21] Y. Sato, A. Kanada, and T. Mashimo, “A Palm-Sized Omnidirectional Mobile Robot Driven by 2-DOF Torus Wheels,” IEEE Robotics and Automation Letters, Vol.8, Issue 1, pp. 105-112, 2023. https://doi.org/10.1109/LRA.2022.3223296
- [22] G. Ishigami, J. Overholt, and K. Iagnemma, “Multi-Material Anisotropic Friction Wheels for Omnidirectional Ground Vehicles,” J. Robot. Mechatron., Vol.24, No.1, pp. 261-267, 2012. https://doi.org/10.20965/jrm.2012.p0261
- [23] T. Ogawa and T. Nakamura, “Path Tracking Method for Traveling-Wave-Type Omnidirectional Mobile Robot (TORoIII),” J. Robot. Mechatron., Vol.24, No.2, pp. 340-346, 2012. https://doi.org/10.20965/jrm.2012.p0340
- [24] R. Raudmäe, S. Schumann, V. Vunder, M. Oidekivi, M. K. Nigol, R. Valner, H. Masnavi, A. K. Singh, A. Aabloo, and K. Kruusamäe, “ROBOTONT – Open-source and ROS-supported omnidirectional mobile robot for education and research,” HardwareX, Vol.14, Article No.e00436, 2023. https://doi.org/10.1016/j.ohx.2023.e00436
- [25] C. Fan, F. Zeng, S. Shirafuji, and J. Ota, “Development of a Three-Mobile-Robot System for Cooperative Transportation,” J. of Mechanisms and Robotics, Vol.16, Issue 2, Article No.021008, 2024. https://doi.org/10.1115/1.4056771
- [26] J. Choi, “Advanced Omni-Directional Mobility System for Human-Friendly Industrial Warehouse Operations,” IEEE Trans. on Industry Applications, Vol.61, Issue 3, pp. 4364-4372, 2025. https://doi.org/10.1109/TIA.2025.3542735
- [27] G. K. Arunkumar, S. Devkar, L. Vachhani, and A. Kunwar, “An Omnidirectional Asymmetric Mobile Robot for Narrow Aisle Spaces,” Proc. of 10th Indian Control Conf. (ICC), pp. 18-23, 2024. https://doi.org/10.1109/ICC64753.2024.10883714
- [28] M. Komori, K. Matsuda, T. Terakawa, F. Takeoka, H. Nishihara, and H. Ohashi, “Active Omni Wheel Capable of Active Motion in Arbitrary Direction and Omnidirectional Vehicle,” J. of Advanced Mechanical Design, Systems, and Manufacturing, Vol.10, Issue 6, Article No.JAMDSM0086, 2016. https://doi.org/10.1299/jamdsm.2016jamdsm0086
- [29] T. Terakawa, M. Komori, M. Sakamoto, Y. Kawato, Y. Morita, and Y. Nishida, “Two-wheel-drive Vehicle That Is Movable in the Longitudinal and Lateral Directions with a Small Number of Motors,” J. of Japan Society for Design Engineering, Vol.54, Issue 2, pp. 145-160, 2019. https://doi.org/10.14953/jjsde.2018.2811
- [30] T. Terakawa, M. Komori, Y. Yamaguchi, and Y. Nishida, “Active Omni Wheel Possessing Seamless Periphery and Omnidirectional Vehicle Using It,” Precision Engineering, Vol.56, pp. 466-475, 2019. https://doi.org/10.1016/j.precisioneng.2019.02.003
- [31] S. Long, T. Terakawa, M. Yogou, R. Koyano, and M. Komori, “Kinetic Analysis of Active Omni Wheel with Barrel-Shaped Rollers for Avoiding Slippage and Vibration,” J. of Mechanisms and Robotics, Vol.16, Issue 5, Article No.051002, 2024. https://doi.org/10.1115/1.4062608
- [32] S. Long, T. Terakawa, M. Komori, and H. Nishihara, “Velocity analysis of vehicle equipped with active omni wheels based on wheel layout,” Proc. of JSME Annual Conf. on Robotics and Mechatronics (Robomec), Session ID 1P3-H04, 2021. https://doi.org/10.1299/jsmermd.2021.1P3-H04
- [33] Japanese Standards Association, “Electric Wheelchairs,” JIS T9203, 2016.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.