Paper:
Drone-Based Coastline Pollution Monitoring System for Detecting and Collecting Garbage
Chi Jie Tan*,†
 , Titan Janthori*, Eiji Hayashi*, and Abbe Mowshowitz**
, Titan Janthori*, Eiji Hayashi*, and Abbe Mowshowitz**
*Department of Creative Informatics, Kyushu Institute of Technology
680-4 Kawazu, Iizuka, Fukuoka 820-0067, Japan
†Corresponding author
**Department of Computer Science, City College of New York
138 Convent Avenue, New York, New York 10031, USA

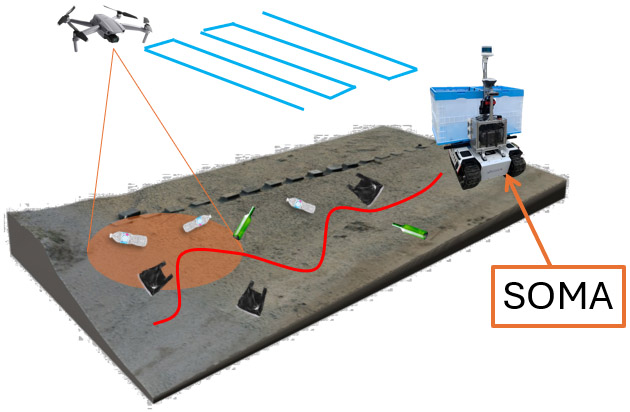
Beach pollution, particularly the accumulation of garbage on seashores in Japan, poses a significant environmental threat. To tackle this persistent issue, beach cleaning activities are necessary. However, beach cleaning is not always scheduled regularly. It depends on the availability of volunteers, resulting in situations where they struggle to clean the beach due to excessive garbage or where there is no garbage left to clean, as the beach was cleaned a short while earlier. Hence, this paper proposes an unmanned aerial vehicle drone-based monitoring system powered with a garbage detection deep learning model. This system also integrates drone technology with a beach-cleaning ground robot to create an efficient cleanup system by planning the route for garbage collection. The research focuses on detecting garbage, locating garbage in the real world, clustering detected locations, and planning paths for ground robots. The system utilizes real-time garbage detection with the YOLOv8 model and georeferencing techniques to map garbage locations accurately. The project also employs hierarchical density-based spatial clustering of application with noise (HDBSCAN) and simulated annealing for optimal route planning. Experiments conducted in simulated and real-world environments, including Hokuto no Mizukumi Seaside Park and the Kyushu Institute of Technology Sports Ground, assessed the system’s accuracy. The results revealed a high detection accuracy of 98.33% in simulations, with an average root mean square error (RMSE) offset error of 0.25 m. In contrast, real-world conditions presented more challenges, resulting in a lower accuracy of 84.26% and an average RMSE of 1.96 m.
Drone-based coastal monitoring
- [1] E. J. Carpenter and K. L. Smith, Jr., “Plastics on the Sargasso Sea surface,” Science, Vol.175, No.4027, pp. 1240-1241, 1972. https://doi.org/10.1126/science.175.4027.1240
- [2] M. Bakirci, “Efficient air pollution mapping in extensive regions with fully autonomous unmanned aerial vehicles: A numerical perspective,” Science of the Total Environment, Vol.909, Article No.168606, 2024. https://doi.org/10.1016/j.scitotenv.2023.168606
- [3] N. Ya’acob et al., “UAV environment monitoring system,” 2017 Int. Conf. on Electrical, Electronics and System Engineering, pp. 105-109, 2017. https://doi.org/10.1109/ICEESE.2017.8298395
- [4] M. K. Ojha, A. Rai, S. K. Jagannathan, O. prakash, and P. K. Mishra, “Unmanned aerial vehicle surveillance and monitoring system based on IoT,” EVERGREEN: Joint J. of Novel Carbon Resource Sciences & Green Asia Strategy, Vol.11, No.4, pp. 3254-3263, 2024. https://doi.org/10.5109/7326960
- [5] V. E. Chapapría, J. S. Peris, and J. A. González-Escrivá, “Coastal monitoring using unmanned aerial vehicles (UAVs) for the management of the Spanish Mediterranean coast: The case of Almenara-Sagunto,” Int. J. of Environmental Research and Public Health, Vol.19, No.9, Article No.5457, 2022. https://doi.org/10.3390/ijerph19095457
- [6] R. Pfeiffer et al., “Use of UAVs and deep learning for beach litter monitoring,” Electronics, Vol.12, No.1, Article No.198, 2023. https://doi.org/10.3390/electronics12010198
- [7] C. J. Tan et al., “3D semantic mapping based on RGB-D camera and LiDAR sensor in beach environment,” 1st Int. Conf. on Robotics, Engineering, Science, and Technology, pp. 21-26, 2024. https://doi.org/10.1109/RESTCON60981.2024.10463570
- [8] M. Quigley et al., “ROS: An open-source robot operating system,” ICRA Workshop on Open Source Software, Vol.3, 2009.
- [9] N. Koenig and A. Howard, “Design and use paradigms for Gazebo, an open-source multi-robot simulator,” 2004 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Vol.3, pp. 2149-2154, 2004. https://doi.org/10.1109/IROS.2004.1389727
- [10] A. Koubâa et al., “Micro air vehicle link (MAVlink) in a nutshell: A survey,” IEEE Access, Vol.7, pp. 87658-87680, 2019. https://doi.org/10.1109/ACCESS.2019.2924410
- [11] D. G. Lowe, “Distinctive image features from scale-invariant keypoints,” Int. J. of Computer Vision, Vol.60, No.2, pp. 91-110, 2004. https://doi.org/10.1023/B:VISI.0000029664.99615.94
- [12] J. Redmon, S. Divvala, R. Girshick, and A. Farhadi, “You only look once: Unified, real-time object detection,” 2016 IEEE Conf. on Computer Vision and Pattern Recognition, 2016. https://doi.org/10.1109/CVPR.2016.91
- [13] M. Kraft, M. Piechocki, B. Ptak, and K. Walas, “Autonomous, onboard vision-based trash and litter detection in low altitude aerial images collected by an unmanned aerial vehicle,” Remote Sensing, Vol.13, No.5, Article No.965, 2021. https://doi.org/10.3390/rs13050965
- [14] N. Aharon, R. Orfaig, and B.-Z. Bobrovsky, “BoT-SORT: Robust associations multi-pedestrian tracking,” arXiv:2206.14651, 2022. https://doi.org/10.48550/arXiv.2206.14651
- [15] Y. Zhang et al., “ByteTrack: Multi-object tracking by associating every detection box,” Proc. of the 17th European Conf. on Computer Vision, Vol.22, 2022. https://doi.org/10.1007/978-3-031-20047-2_1
- [16] A. Hackeloeer, K. Klasing, J. M. Krisp, and L. Meng, “Georeferencing: A review of methods and applications,” Annals of GIS, Vol.20, No.1, pp. 61-69, 2014. https://doi.org/10.1080/19475683.2013.868826
- [17] A. Weintrit and P. Kopcz, “Loxodrome (rhumb line), orthodrome (great circle), great ellipse and geodetic line (geodesic) in navigation,” CRC Press, Inc., 2014.
- [18] Ministry of Defense (Navy), “Admiralty manual of navigation, Vol.1,” The Stationery Office, 1987.
- [19] X. Jin and J. Han, “K-means clustering,” C. Sammut and G. I. Webb (Eds.), “Encyclopedia of Machine Learning,” pp. 563-564, Springer, 2011. https://doi.org/10.1007/978-0-387-30164-8_425
- [20] L. McInnes, J. Healy, and S. Astels, “hdbscan: Hierarchical density based clustering,” J. of Open Source Software, Vol.2, No.11, Article No.205, 2017. https://doi.org/10.21105/joss.00205
- [21] M. Held and R. M. Karp, “A dynamic programming approach to sequencing problems,” J. of the Society for Industrial and Applied Mathematics, Vol.10, No.1, pp. 196-210, 1962. https://doi.org/10.1137/0110015
- [22] A. Mowshowitz, A. Tominaga, and E. Hayashi, “Robot navigation in forest management,” J. Robot. Mechatron., Vol.30, No.2, pp. 223-230, 2018. https://doi.org/10.20965/jrm.2018.p0223
- [23] D. Henderson, S. H. Jacobson, and A. W. Johnson, “The theory and practice of simulated annealing,” F. Glover and G. A. Kochenberger (Eds.), “Handbook of Metaheuristics,” pp. 287-319, 2003. https://doi.org/10.1007/0-306-48056-5_10
- [24] V. M. Scarrica et al., “A novel beach litter analysis system based on UAV images and Convolutional Neural Networks,” Ecological Informatics, Vol.72, Article No.101875, 2022. https://doi.org/10.1016/j.ecoinf.2022.101875
- [25] R. L. Thorndike, “Who belongs in the family?,” Psychometrika, Vol.18, No.4, pp. 267-276, 1953. https://doi.org/10.1007/BF02289263
- [26] S. Duangsuwan and P. Prapruetdee, “Drone-enabled AI edge computing and 5G communication network for real-time coastal litter detection,” Drones, Vol.8, No.12, Article No.750, 2024. https://doi.org/10.3390/drones8120750
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.