Paper:
Detection and Recovery Method for Immobilized Mobile Robot
Yoshitaka Doi, Kohei Hosoi, Takao Murayama, and Yutaka Uchimura

Shibaura Institute of Technology
3-7-5 Toyosu, Koto-ku, Tokyo 135-8548, Japan

This paper proposes a method for detecting and recovering from immobilized states in mobile robots operating in outdoor environments. In recent years, the demand for autonomous mobile robots capable of navigating outdoor environments has been increasing. In particular, the delivery industry anticipates replacing human-driven transport with robots to cover the section between pickup and delivery points. However, achieving autonomous navigation in outdoor environments is significantly more challenging than in indoor settings as robots must coexist with pedestrians and vehicles while complying with traffic regulations, such as obeying pedestrian signals. In this study, we aimed to develop a mobile robot capable of autonomous navigation from a starting point to a target point in a real outdoor environment. We implemented a self-position estimation method using scan matching between the real-time point-cloud data and a loop-closure-corrected three-dimensional point-cloud map. This was integrated with a path-planning system that combines detection and recovery of a robot from immobilized states, prioritized velocity control, and event-based waypoints, enabling safe autonomous navigation that complies with traffic rules in outdoor environments. In addition, we implemented a control architecture that prioritizes asynchronous velocity commands sent in parallel. To enhance the autonomy of mobile robots, a method was proposed in this study in which the robot detects obstacles and recovers from an immobilized state when it becomes stuck after colliding with these obstacles that cannot be captured by obstacle sensors during navigation. To evaluate the effectiveness of the proposed method, we conducted experiments using an autonomous mobile robot developed in this study to recover it from being stuck on a low step that the obstacle sensor could not detect. In the final run in the Tsukuba Challenge 2024, the system successfully performed four tasks of signal recognition and crossings and completed visits to both pickup and delivery destinations. The mobile robot also completed a 2 km course and was awarded the Tsukuba Mayor’s Award.
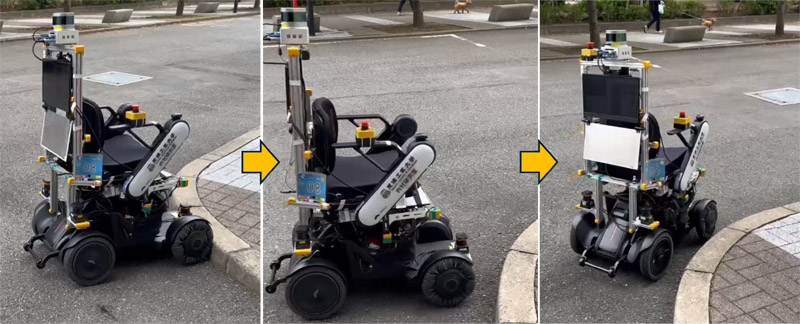
Stuck recovery sequence from a sidewalk step
- [1] Y. Kanuki, N. Ohta, and N. Nakazawa, “Development of Autonomous Moving Robot Using Appropriate Technology for Tsukuba Challenge,” J. Robot. Mechatron., Vol.35, No.2, pp. 279-287, 2023. https://doi.org/10.20965/jrm.2023.p0279
- [2] Y. Hara, T. Tomizawa, H. Date, Y. Kuroda, and T. Tsubouchi, “Tsukuba Challenge 2019: Task Settings and Experimental Results,” J. Robot. Mechatron., Vol.32, No.6, pp. 1104-1111, 2020. https://doi.org/10.20965/jrm.2020.p1104
- [3] S. Yuta, “Tsukuba Challenge: Open Experiments for Autonomous Navigation of Mobile Robots in the City – Activities and Results of the First and Second Stages –,” J. Robot. Mechatron., Vol.30, No.4, pp. 504-512, 2018. https://doi.org/10.20965/jrm.2018.p0504
- [4] T. Eda, T. Hasegawa, S. Nakamura, and S. Yuta, “Development of Autonomous Mobile Robot “MML-05” Based on i-Cart Mini for Tsukuba Challenge 2015,” J. Robot. Mechatron., Vol.28, No.4, pp. 461-469, 2016. https://doi.org/10.20965/jrm.2016.p0461
- [5] J. Borenstein and Y. Koren, “High-speed Obstacle Avoidance for Mobile Robots,” Proc. IEEE Symp. on Intelligent Control, pp. 382-384, 1988. https://doi.org/10.1109/ISIC.1988.65461
- [6] V. Sezer and M. Gokasan, “A Novel Obstacle Avoidance Algorithm: “Follow the Gap Method”,” Robotics Autonomous Syst., Vol.60, Issue 9, pp. 1123-1134, 2012. https://doi.org/10.1016/j.robot.2012.05.021
- [7] O. Khatib, “Real-Time Obstacle Avoidance for Manipulators and Mobile Robots,” Proc. 1985 IEEE Int. Conf. on Robotics and Automation, pp. 500-505, 1985. https://doi.org/10.1109/ROBOT.1985.1087247
- [8] J. Borenstein and Y. Koren, “The vector field histogram-fast obstacle avoidance for mobile robots,” IEEE Trans. on Robot. Autom., Vol.7, Issue 3, pp. 278-288, 1991. https://doi.org/10.1109/70.88137
- [9] I. Ulrich and J. Borenstein, “VFH+: Reliable Obstacle Avoidance for Fast Mobile Robots,” Proc. 1998 IEEE Int. Conf. Robotics and Automation, Vol.2, pp. 1572-1577, 1998. https://doi.org/10.1109/ROBOT.1998.677362
- [10] I. Susnea, A. Filipescu, G. Vasiliu, G. Coman, and A. Radaschin, “The Bubble Rebound Obstacle Avoidance Algorithm for Mobile Robots,” Proc. Int. Conf. Control and Automation (ICCA) 2010, pp. 540-545, 2010. https://doi.org/10.1109/ICCA.2010.5524302
- [11] D. Fox, W. Burgard, and S. Thrun, “The Dynamic Window Approach to Collision Avoidance,” IEEE Robot. Autom. Mag., Vol.4, Issue 1, pp. 23-33, 1997. https://doi.org/10.1109/100.580977
- [12] J. Choi, G. Lee, and C. Lee, “Reinforcement Learning-Based Dynamic Obstacle Avoidance and Integration of Path Planning,” Intell. Serv. Robotics, Vol.14, pp. 663-677, 2021. https://doi.org/10.1007/s11370-021-00387-2
- [13] P. Nourizadeh, F. J. S. McFadden, and W. N. Browne, “In Situ Slip Estimation for Mobile Robots in Outdoor Environments,” J. Field Robotics, Vol.40, Issue 3, pp. 467-482, 2023. https://doi.org/10.1002/rob.22141
- [14] T. Omura and G. Ishigami, “Wheel Slip Classification Method for Mobile Robot in Sandy Terrain Using In-Wheel Sensor,” J. Robot. Mechatron., Vol.29, No.5, pp. 902-910, 2017. https://doi.org/10.20965/jrm.2017.p0902
- [15] H. Qi, Y. Song, Z. Huang, and X. Hu, “Deadlock Detection, Cooperative Avoidance and Recovery Protocol for Mixed Autonomous Vehicles in Unstructured Environment,” IET Intell. Transp. Syst., Vol.18, Issue 3, pp. 495-516, 2024. https://doi.org/10.1049/itr2.12338
- [16] M. Jager and B. Nebel, “Decentralized Collision Avoidance, Deadlock Detection, and Deadlock Resolution for Multiple Mobile Robots,” Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Vol.3, pp. 1213-1219, 2001. https://doi.org/10.1109/IROS.2001.977148
- [17] H. Miyanaka, N. Wada, T. Kamegawa, N. Sato, S. Tsukui, H. Igarashi, and F. Matsuno, “Development of an Unit-Type Robot “KOHGA2” with Stuck Avoidance Ability,” Proc. IEEE Int. Conf. on Robotics and Automation, pp. 3877-3882, 2007. https://doi.org/10.1109/ROBOT.2007.364073
- [18] F. Uwano, Y. Tajima, A. Murata, and K. Takadama, “Recovery System Based on Exploration-Biased Genetic Algorithm for Stuck Rover in Planetary Exploration,” J. Robot. Mechatron., Vol.29, No.5, pp. 877-886, 2017. https://doi.org/10.20965/jrm.2017.p0877
- [19] M. Quigley et al., “ROS: An Open-Source Robot Operating System,” Proc. ICRA Workshop Open Source Software, Vol.3, No.2, 2009.
- [20] S. Macenski, F. Martín, R. White, and J. G. Clavero, “The Marathon 2: A Navigation System,” Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2718-2725, 2020. https://doi.org/10.1109/IROS45743.2020.9341207
- [21] R. Sekine, T. Tomizawa, and S. Tarao, “Trial of Utilization of an Environmental Map Generated by a High-Precision 3D Scanner for a Mobile Robot,” J. Robot. Mechatron., Vol.35, No.6, pp. 1469-1479, 2023. https://doi.org/10.20965/jrm.2023.p1469
- [22] T. Hasegawa, H. Miyoshi, and S. Yuta, “Experimental Study of Seamless Switch Between GNSS- and LiDAR-Based Self-Localization,” J. Robot. Mechatron., Vol.35, No.6, pp. 1514-1523, 2023. https://doi.org/10.20965/jrm.2023.p1514
- [23] H. Kurita, M. Oku, T. Nakamura, T. Yoshida, and T. Fukao, “Localization Method Using Camera and LiDAR and Its Application to Autonomous Mowing in Orchards,” J. Robot. Mechatron., Vol.34, No.4, pp. 877-886, 2022. https://doi.org/10.20965/jrm.2022.p0877
- [24] Y. Fujita, K. Wada, N. Arai, K. Nosue, and Y. Uchimura, “Control Method of Autonomous Mobile Robot Using Self-Position Estimation Integrating 3D Point Cloud and Camera Data,” Proc. SICE Annual Conf. Sys. Integration, pp. 879-882, 2019.
- [25] D. Nister, O. Naroditsky, and J. Bergen, “Visual Odometry,” Proc. of IEEE Computer Society Conf. on Computer Vision and Pattern Recognition (CVPR), pp. I-652-I-659, 2004. https://doi.org/10.1109/CVPR.2004.1315094
- [26] P. J. Besl and N. D. McKay, “A Method for Registration of 3-D Shapes,” IEEE Trans. on Pattern Anal. Mach. Intell., Vol.14, Issue 2, pp. 239-256, 1992. https://doi.org/10.1109/34.121791
- [27] M. Magnusson, A. Lilienthal, and T. Duckett, “Scan Registration for Autonomous Mining Vehicles Using 3D-NDT,” J. Field Robotics, Vol.24, Issue 10, pp. 803-827, 2007. https://doi.org/10.1002/rob.20204
- [28] M. S. Grewal and A. P. Andrews, “Applications of Kalman Filtering in Aerospace 1960 to the Present [Historical Perspectives],” IEEE Control Syst. Mag., Vol.30, Issue 3, pp. 69-78, 2010. https://doi.org/10.1109/MCS.2010.936465
- [29] M. Higuchi, H. Nakamura, and H. Nishitani, “Self-Localization for a Mobile Vehicle Using an Initial State Observer,” Trans. of the Society of Instrument and Control Engineers, Vol.43, Issue 5, pp. 347-356, 2007. https://doi.org/10.9746/ve.sicetr1965.43.347
- [30] W. Hess, D. Kohler, H. Rapp, and D. Andor, “Real-Time Loop Closure in 2D LIDAR SLAM,” 2016 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 1271-1278, 2016. https://doi.org/10.1109/ICRA.2016.7487258
- [31] S. Thrun and A. Bü, “Integrating Grid-Based and Topological Maps for Mobile Robot Navigation,” Proc of the 13th National Conf. on Artificial Intelligence (AAAI’96), Vol.2, pp. 944-950, 1996.
- [32] R. Brooks, “A Robust Layered Control System for a Mobile Robot,” IEEE J. Robot. Autom., Vol.2, Issue 1, pp. 14-23, 1986. https://doi.org/10.1109/JRA.1986.1087032
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.