Paper:
Coverage Maintenance in Multi-Robot Systems Under Sensor Failures
Toru Murayama
 , Shion Taira, and Shuhei Yamamoto
, Shion Taira, and Shuhei Yamamoto
National Institute of Technology, Wakayama College
77 Noshima, Nada, Gobo, Wakayama 644-0023, Japan

This study focuses on the challenges that arise following sensor failures in multi-robot systems reliant on relative position sensing for cooperative tasks. As a robot with a failed sensor cannot directly observe its neighbors, it would be unable to participate in coordinated coverage control. To address this issue, we propose a two-part method. First, a relative position estimation strategy enables the failed robot to infer the positions of its neighbors by using their shared observations and a dead-reckoning process based on communicated velocity data. Second, a motion control strategy guides the failed robot to a location where the overall sensor coverage area can be maximally recovered. The proposed strategies are designed to operate in a distributed manner by using only local communication. The effectiveness of the two-part method is demonstrated through experiments with physical robots and numerical simulations. The results reveal that sensor coverage can be maintained or restored even after sensor failures. These findings support the feasibility of robust multi-robot coordination in scenarios involving sensor failures.
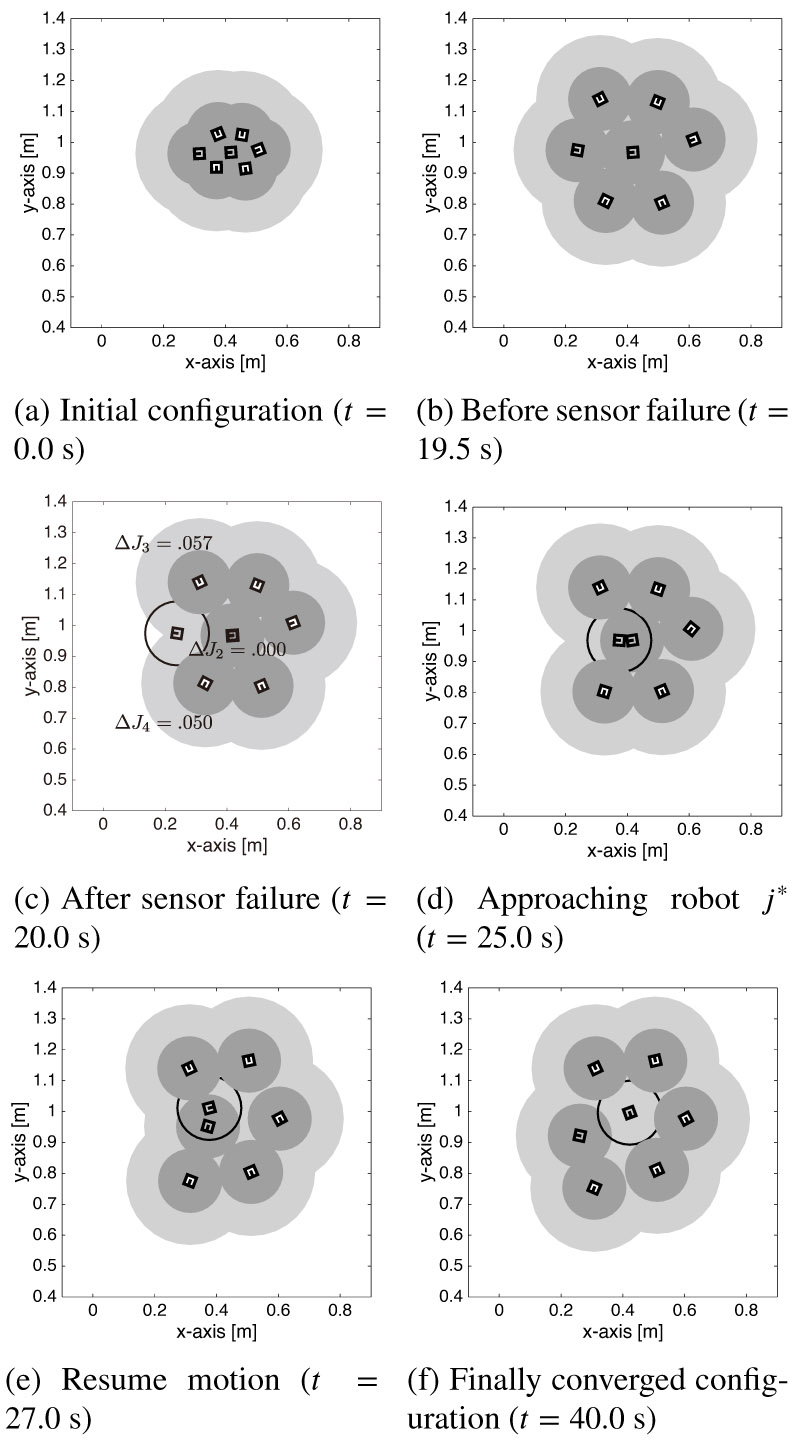
Configuration of robots in the experiment with N = 7
- [1] J. Cortés and M. Egerstedt, “Coordinated Control of Multi-Robot Systems: A Survey,” SICE J. of Control Measurement, and System Integration, Vol.10, No.6, pp. 495-503, 2017. https://doi.org/10.9746/jcmsi.10.495
- [2] J. P. Queralta, J. Taipalmaa, B. C. Pullinen, V. K. Sarker, T. N. Gia, H. Tenhunen, M. Gabbouj, J. Raitoharju, and T. Westerlund, “Collaborative Multi-Robot Search and Rescue: Planning, Coordination, Perception, and Active Vision,” IEEE Access, Vol.8, pp. 191617-191643, 2020. https://doi.org/10.1109/ACCESS.2020.3030190
- [3] Y. Watanobe, R. Kabir, R. Aoba, A. Ohashi, S. Ogata, M. Shiga, K. Tsuruno, T. Anazawa, and K. Naruse, “Disaster Rescue via Multi-Robot Collaboration: Development, Control, and Deployment,” J. Robot. Mechatron., Vol.35, No.1, pp. 85-98, 2023. https://doi.org/10.20965/jrm.2023.p0085
- [4] H. Sugiyama, T. Tsujioka, and M. Murata, “Real-time exploration of a multi-robot rescue system in disaster areas,” Advanced Robotics, Vol.27, No.17, pp. 1313-1323, 2013. https://doi.org/10.1080/01691864.2013.838333
- [5] T. Andre and C. Bettstetter, “Collaboration in Multi-Robot Exploration: To Meet or not to Meet?,” J. of Intelligent and Robotic Systems, Vol.82, pp. 325-337, 2016. https://doi.org/10.1007/s10846-015-0277-0
- [6] A. Prorok, V. Kumar, B. Sadler, and G. Sukhatme, “Introduction to the Special Section on Resilience in Networked Robotic Systems,” IEEE Trans. on Robotics, Vol.38, No.1, pp. 2-4, 2022. https://doi.org/10.1109/TRO.2022.3143013
- [7] L. Guerrero-Bonilla, A. Prorok, and V. Kumar, “Formations for Resilient Robot Teams,” IEEE Robotics and Automation Letters, Vol.2, No.2, pp. 841-848, 2017. https://doi.org/10.1109/LRA.2017.2654550
- [8] E. C. Ferrer, E. Jiménez, J. L. Lopez-Presa, and J. Martín-Rueda, “Following Leaders in Byzantine Multirobot Systems by Using Blockchain Technology,” IEEE Trans. on Robotics, Vol.38, No.2, pp. 1101-1117, 2022. https://doi.org/10.1109/TRO.2021.3104243
- [9] H. Park and S. A. Hutchinson, “Fault-Tolerant Rendezvous of Multirobot Systems,” IEEE Trans. on Robotics, Vol.33, No.3, pp. 565-582, 2017. https://doi.org/10.1109/TRO.2017.2658604
- [10] C. Ghedini, C. Ribeiro, and L. Sabattini, “Toward fault-tolerant multi-robot networks,” Networks, Vol.70, No.4, pp. 388-400, 2017. https://doi.org/10.1002/net.21784
- [11] W. Luo, N. Chakraborty, and K. Sycara, “Minimally Disruptive Connectivity Enhancement for Resilient Multi-Robot Teams,” 2020 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 11809-11816, 2020. https://doi.org/10.1109/IROS45743.2020.9340733
- [12] A. Suarez, G. Heredia, and A. Ollero, “Cooperative sensor fault recovery in multi-UAV systems,” 2016 IEEE Int. Conf. on Robotics and Automation, pp. 1188-1193, 2016. https://doi.org/10.1109/ICRA.2016.7487249
- [13] X. Wang, S. Sun, T. Li, and Y. Liu, “Fault Tolerant Multi-Robot Cooperative Localization Based on Covariance Union,” IEEE Robotics and Automation Letters, Vol.6, No.4, pp. 7799-7806, 2021. https://doi.org/10.1109/LRA.2021.3100000
- [14] J. Cortés, S. Martinez, and F. Bullo, “Spatially-distributed coverage optimization and control with limited-range interactions,” ESAIM: Control, Optimisation and Calculus of Variations, Vol.11, No.4, pp. 691-719, 2005. https://doi.org/10.1051/cocv:2005024
- [15] L. Dou, C. Song, X. Wang, L. Liu, and G. Feng, “Coverage Control for Heterogeneous Mobile Sensor Networks Subject to Measurement Errors,” IEEE Trans. on Automatic Control, Vol.63, No.10, pp. 3479-3486, 2018. https://doi.org/10.1109/TAC.2018.2799491
- [16] F. Pratissoli, B. Capelli, and L. Sabattini, “On Coverage Control for Limited Range Multi-Robot Systems,” 2022 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2022), pp. 9957-9963, 2022. https://doi.org/10.1109/IROS47612.2022.9982002
- [17] S. Yamamoto and T. Murayama, “Relative Position Estimation for Multi-Robot Collaboration with Sensor Failure,” Proc. of JSME annual Conf. on Robotics and Mechatronics (Robomec), Article No.1P2-L10, 2024 (in Japanese). https://doi.org/10.1299/jsmermd.2024.1P2-L10
- [18] S. Taira and T. Murayama, “Coverage Preservation Control for Multi-Robot Systems Considering Sensor Failure,” Proc. of JSME annual Conf. on Robotics and Mechatronics (Robomec), Article No.1P2-L09, 2024 (in Japanese). https://doi.org/10.1299/jsmermd.2024.1P2-L09
- [19] J. van den Berg, M. Lin, and D. Manocha, “Reciprocal Velocity Obstacles for real-time multi-agent navigation,” 2008 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 1928-1935, 2008. https://doi.org/10.1109/ROBOT.2008.4543489
- [20] A. Howard, “Multi-robot Simultaneous Localization and Mapping using Particle Filters,” The Int. J. of Robotics Research, Vol.25, No.12, pp. 1243-1256, 2006. https://doi.org/10.1177/0278364906072250
- [21] T. Murayama, “Distributed Control for Bi-connectivity of Multi-robot Network,” SICE J. of Control, Measurement, and System Integration, Vol.16, No.1, pp. 1-10, 2023. https://doi.org/10.1080/18824889.2022.2157194
- [22] L. Zhang, Z. Zhang, R. Siegwart, and J. J. Chung, “A Connectivity-Prediction Algorithm and its Application in Active Cooperative Localization for Multi-Robot Systems,” 2020 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 9824-9830, 2020. https://doi.org/10.1109/ICRA40945.2020.9197083
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.