Development Report:
Autonomous Driving of Mobile Robot Based on LIO and GNSS—Use of LiDAR and IMU Information in Areas with Weak Satellite Signal—
Leqi Han*, Haruki Ishii*, Songyuan Liu*, Tomokazu Takahashi*, Masato Suzuki*
 , Kazuyo Tsuzuki**
, Yasushi Mae*, and Seiji Aoyagi*,†
, Kazuyo Tsuzuki**
, Yasushi Mae*, and Seiji Aoyagi*,†
*Department of Mechanical Engineering, Faculty of Engineering Science, Kansai University
3-3-35 Yamate-cho, Suita, Osaka 564-8680, Japan
†Corresponding author
**Department of Architecture, Faculty of Environmental and Urban Engineering, Kansai University
3-3-35 Yamate-cho, Suita, Osaka 564-8680, Japan

Teams participating in autonomous robot competitions often measure the environment of the course in advance using a laser range finder, create an environmental map, and realize localization based on this map. However, the method using environmental maps has the problems of difficulty in dealing with environmental changes and complex environments, as well as the high time cost of measuring the environment in advance. To solve these problems, we proposed a localization method that does not require prior maps using RTK-GNSS and LiDAR inertial odometry based on the VGICP, the point cloud registration algorithm. In order to guarantee the accuracy of GNSS location information, we defined three indicators of satellite reception status and proposed a method to discriminate the GNSS environment by setting a threshold value for each indicator. We implemented the proposed methods in an autonomous robot and conducted positioning and autonomous driving experiments on three courses in the university campus with different GNSS reception environments, where the effectiveness of the proposed localization method and GNSS reception environment discrimination method was confirmed.
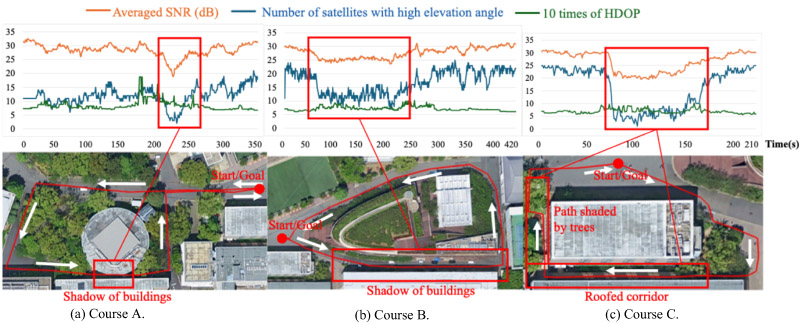
GNSS accuracy indicators over a robot run
- [1] J. Kwon, M. Choi, C. Chun, and F. C. Park, “Particle filtering on the Euclidean group,” Proc. 2007 IEEE Int. Conf. on Robotics and Automation, pp. 3552-3557, 2007. https://doi.org/10.1109/ROBOT.2007.364022
- [2] F. Dieter et al., “Monte Carlo localization: Efficient position estimation for mobile robots,” Proc. of the AAAI Conf. on Artificial Intelligence, pp. 343-349, 1999.
- [3] S. Niijima, Y. Sasaki, and H. Mizoguchi, “Real-time autonomous navigation of an electric wheelchair in large-scale urban area with 3D map,” Advanced Robotics, Vol.33, No.19, pp. 1006-1018, 2019. https://doi.org/10.1080/01691864.2019.1642240
- [4] Z. Fan et al., “3D Mapping of multi-floor buildings based on sensor fusion,” 2017 Int. Conf. on Industrial Informatics – Computing Technology, Intelligent Technology, Industrial Information Integration (ICIICII), pp. 10-15, 2017. https://doi.org/10.1109/ICIICII.2017.10
- [5] S. Leisiazar, M. Mahdavian, E. J. Park, and M. Chen, “Real-time mapping of multi-floor buildings using elevators,” 2022 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), pp. 314-321, 2022. https://doi.org/10.1109/AIM52237.2022.9863407
- [6] M.-A. Raul, J. M. M. Montiel, and J. D. Tardos, “ORB-SLAM: A versatile and accurate monocular SLAM system,” IEEE Trans. on Robotics, Vol.31, No.5, pp. 1147-1163, 2015. https://doi.org/10.1109/TRO.2015.2463671
- [7] T. Hasegawa, H. Miyoshi, and S. Yuta, “Experimental study of seamless switch between GNSS- and LiDAR-based self-localization,” J. Robot. Mechatron., Vol.35, No.6, pp. 1514-1523, 2023. https://doi.org/10.20965/jrm.2023.p1514
- [8] J. Meguro, R. Hirokawa, J. Takiguchi, and T. Hashizume, “Autonomous mobile surveillance based on RTK-GPS in urban canyons,” J. Robot. Mechatron., Vol.17, No.2, pp. 218-225, 2005. https://doi.org/10.20965/jrm.2005.p0218
- [9] A. Takanose, K. Kondo, Y. Hoda, J. Meguro, and K. Takeda, “Localization system for vehicle navigation based on GNSS/IMU using time-series optimization with road gradient constrain,” J. Robot. Mechatron., Vol.35, No.2, pp. 387-397, 2023. https://doi.org/10.20965/jrm.2023.p0387
- [10] T. Takubo, M. Sato, and A. Ueno, “Wrong fix detection for RTK positioning based on relative position between multiple antennas,” J. Robot. Mechatron., Vol.36, No.2, pp. 472-482, 2024. https://doi.org/10.20965/jrm.2024.p0472
- [11] K. Koide, M. Yokozuka, S. Oishi, and A. Banno, “Voxelized GICP for fast and accurate 3D point cloud registration,” 2021 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 11054-11059, 2021. https://doi.org/10.1109/ICRA48506.2021.9560835
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.