Paper:
GNSS/IMU Simulator for Position Estimation Using LOS-Based GNSS Modeling and Dynamic Allan Variance Gyro Simulation
Daiki Niimi*, Mitsuki Komae*, and Junichi Meguro**

*Department of Mechatronics Engineering, Graduate School of Science and Technology, Meijo University
1-501 Shiogamaguchi, Tempaku-ku, Nagoya, Aichi 468-8502, Japan
**Department of Mechatronics Engineering, Faculty of Science and Technology, Meijo University
1-501 Shiogamaguchi, Tempaku-ku, Nagoya, Aichi 468-8502, Japan

In the current field of autonomous driving, a significant focus is on the development and utilization of simulators. However, existing autonomous driving simulators often lack thorough consideration of position estimation, particularly with regard to global navigation satellite system (GNSS) and inertial measurement unit (IMU). This study targets ground-moving robots and autonomous vehicles, aiming to develop a GNSS/IMU simulator capable of generating realistic errors that align with real-world environments to facilitate pre-validation of position estimation accuracy. Initially, for GNSS, positioning solutions were predicted using the number of satellites obtained through a line-of-sight/non-line-of-sight simulation based on 3D building data. Subsequently, to consider the performance degradation of the Allan deviation under dynamic environments, we improved the conventional gyro model based on static-environment Allan deviation by incorporating error factors associated with dynamic environmental influences. Finally, the accuracy of position estimation was verified using real vehicle and simulator-acquired sensor data. Similar trends in position estimation results confirmed the potential for pre-validation of position estimation accuracy.
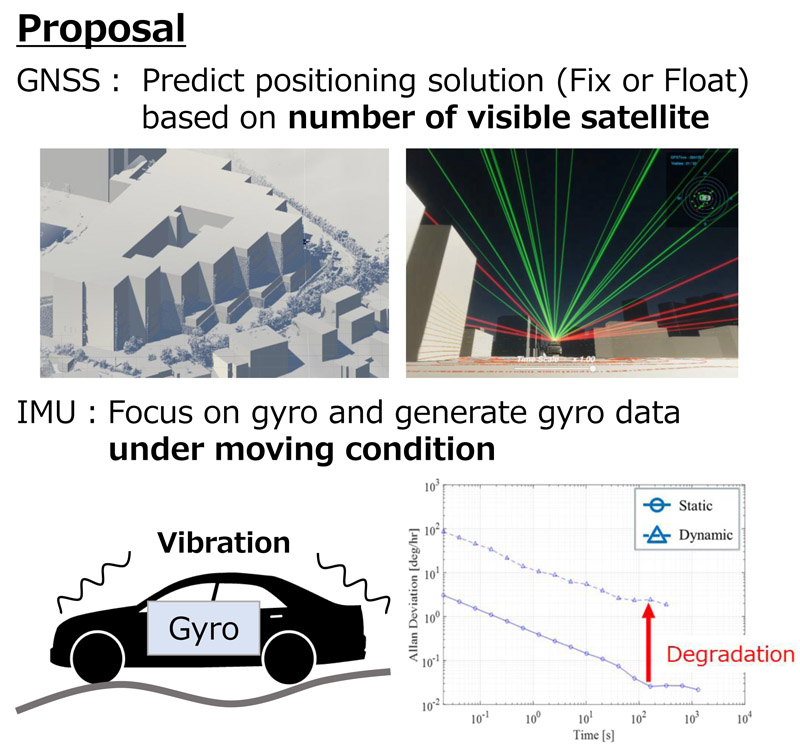
Overview of the proposed GNSS/IMU simulator
- [1] G. Ros et al., “Vision-based offline-online perception paradigm for autonomous driving,” 2015 IEEE Winter Conf. on Applications of Computer Vision, pp. 231-238, 2015. https://doi.org/10.1109/WACV.2015.38
- [2] A. Takanose, K. Kondo, Y. Hoda, J. Meguro, and K. Takeda, “Localization system for vehicle navigation based on GNSS/IMU using time-series optimization with road gradient constrain,” J. Robot. Mechatron., Vol.35, No.2, pp. 387-397, 2023. https://doi.org/10.20965/jrm.2023.p0387
- [3] A. J. Van Dierendonck, P. Fenton, and T. Ford, “Theory and performance of narrow correlator spacing in a GPS receiver,” Navigation, Vol.39, No.3, pp. 265-283, 1992. https://doi.org/10.1002/j.2161-4296.1992.tb02276.x
- [4] D. Gebre-Egziabher, C. O. L. Boyce Jr., J. D. Powell, and P. Enge, “An inexpensive DME-aided dead reckoning navigator,” Navigation, Vol.50, No.4, pp. 247-263, 2003. https://doi.org/10.1002/j.2161-4296.2003.tb00333.x
- [5] P. J. Durst and C. Goodin, “High fidelity modelling and simulation of inertial sensors commonly used by autonomous mobile robots,” World J. of Modelling and Simulation, Vol.8, No.3, pp. 172-184, 2012.
- [6] S. Shah, D. Dey, C. Lovett, and A. Kapoor, “AirSim: High-fidelity visual and physical simulation for autonomous vehicles,” Field and Service Robotics: Results of the 11th Int. Conf., pp. 621-635, 2018. https://doi.org/10.1007/978-3-319-67361-5_40
- [7] A. Elmquist, R. Serban, and D. Negrut, “A sensor simulation framework for training and testing robots and autonomous vehicles,” J. of Autonomous Vehicles and Systems, Vol.1, No.2, Article No.021001, 2021. https://doi.org/10.1115/1.4050080
- [8] S. Miura, H. Shoma, and S. Kamij, “GPS positioning with multipath detection and rectification using 3D maps,” Int. J. of Automotive Engineering, Vol.5, No.1, pp. 23-29, 2014. https://doi.org/10.20485/jsaeijae.5.1_23
- [9] P. J. G. Teunissen and O. Montenbruck (Eds.), “Springer handbook of global navigation satellite systems,” Springer, 2017, https://doi.org/10.1007/978-3-319-42928-1
- [10] A. Takanose, Y. Atsumi, K. Takikawa, and J. Meguro, “Improvement of reliability determination performance of real time kinematic solutions using height trajectory,” Sensors, Vol.21, No.2, Article No.657, 2021. https://doi.org/10.3390/s21020657
- [11] T. Takasu and A. Yasuda, “Development of the low-cost RTK-GPS receiver with an open source program package RTKLIB,” The Int. Symp. on GPS/GNSS, 2009.
- [12] P. J. G. Teunissen, “Least-squares estimation of the integer GPS ambiguities,” General Meeting of the Int. Association of Geodesy, 1993.
- [13] D. W. Allan, N. Ashby, and C. C. Hodge, “Aglient AN 1289: The science of timekeeping – Application Note,” Aglient Technologies, 1997.
- [14] D. W. Allan, “Statistics of atomic frequency standards,” Proc. of the IEEE, Vol.54, No.2, pp. 221-230, 1966. https://doi.org/10.1109/PROC.1966.4634
- [15] “IEEE standard specification format guide and test procedure for single-axis laser gyros,” IEEE Std 647-2006 (revision of IEEE Std 647-1995), 2006. https://doi.org/10.1109/IEEESTD.2006.246241
- [16] R. J. Vaccaro and A. S. Zaki, “Statistical modeling of rate gyros,” IEEE Trans. on Instrumentation and Measurement, Vol.61, No.3, pp. 673-684, 2012. https://doi.org/10.1109/TIM.2011.2171609
- [17] N. El-Sheimy, H. Hou, and X. Niu, “Analysis and modeling of inertial sensors using Allan variance,” IEEE Trans. on Instrumentation and Measurement, Vol.57, No.1, pp. 140-149, 2008. https://doi.org/10.1109/TIM.2007.908635
- [18] Y. Atsumi, K. Kondo, S. Yasue, Y. Hoda, and J. Meguro, “Evaluating the relationship between gyro performance and vehicle trajectory accuracy in a dynamic environment,” The Abstracts of the 7th Int. Conf. on Advanced Mechatronics: Toward Evolutionary Fusion of IT and Mechatronics (ICAM), Article No.GS7-3, 2021. https://doi.org/10.1299/jsmeicam.2021.7.GS7-3
- [19] R. Furukawa, N. Kubo, and A. El-Mowafy, “Verification of GNSS multipath and positioning in urban areas using 3D maps,” IEICE Communications Express, Vol.9, No.11, pp. 529-534, 2020. https://doi.org/10.1587/comex.2020XBL0096
- [20] R. Furukawa, N. Kubo, and A. El-Mowafy, “Prediction of RTK-GNSS performance in urban environments using a 3D model and continuous LoS method,” Proc. of the 2020 Int. Technical Meeting of the Institute of Navigation, pp. 763-771, 2020. https://doi.org/10.33012/2020.17176
- [21] N. Chinchor, “MUC-4 evaluation metrics,” Proc. of the 4th Conf. on Message Understanding, pp. 22-29, 1992. https://doi.org/10.3115/1072064.1072067
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.