Paper:
Vehicle Platooning Based on Second-Order Pinning Consensus Control and its Cyber Attack Detection
Ikumi Kidokoro
 , Koichi Kobayashi
, and Yuh Yamashita
, Koichi Kobayashi
, and Yuh Yamashita
Hokkaido University
Kita 14, Nishi 9, Kita-ku, Sapporo, Hokkaido 060-0814, Japan

In this paper, we propose a vehicle platooning method based on pinning consensus control and its cyber attack detection. The consensus problem, in which the state of each agent is matched through communications, is a well-known control problem. Pinning control is a method of adding external control inputs to pre-specified agents called pinning agents. This control method can set the state of an agent to a value other than its initial average value or increase the rate at which it converges. Model predictive control (MPC) involves obtaining control inputs by solving the finite-time optimal control problem at each discrete time. Using pinning consensus control and MPC, we consider vehicle group control, in which multiple vehicles are controlled as a single group. In addition, a method for detecting cyber attacks on pinning agents is also proposed.
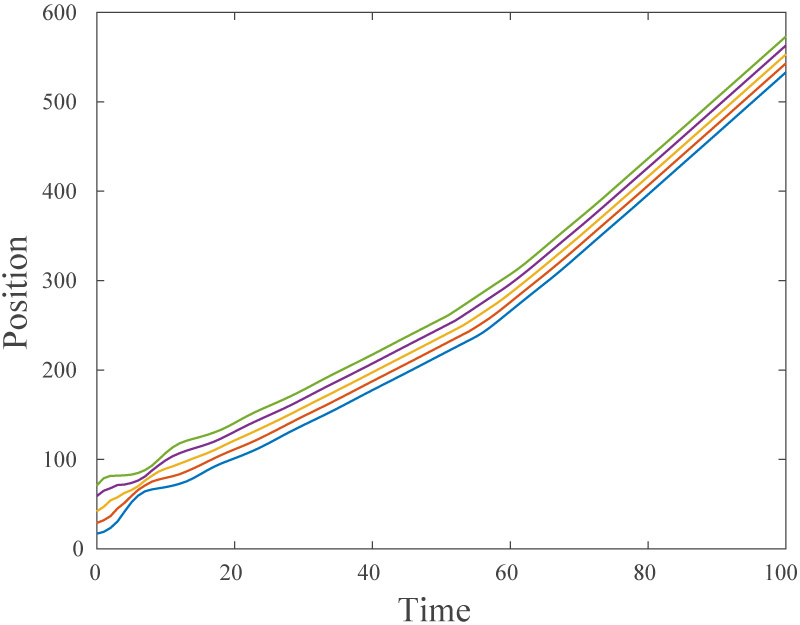
Time response of positions of all agents
- [1] M. A. S. Kamal, C. P. Tan, T. Hayakawa, S.-I. Azuma, and J.-I. Imura, “Control of vehicular traffic at an intersection using a cyber-physical multiagent framework,” IEEE Trans. on Industrial Informatics, Vol.17, No.9, pp. 6230-6240, 2021. https://doi.org/10.1109/TII.2021.3051961
- [2] D. Xie and S. Wang, “Consensus of second-order discrete-time multi-agent systems with fixed topology,” J. of Mathematical Analysis and Applications, Vol.387, No.1, pp. 8-16, 2012. https://doi.org/10.1016/j.jmaa.2011.08.052
- [3] J. Zhan, Z.-P. Jiang, Y. Wang, and X. Li, “Distributed model predictive consensus with self-triggered mechanism in general linear multiagent systems,” IEEE Trans. on Industrial Informatics, Vol.15, No.7, pp. 3987-3997, 2018. https://doi.org/10.1109/TII.2018.2884449
- [4] M. Hirche, P. N. Köhler, M. A. Müller, and F. Allgöwer, “Distributed model predictive control for consensus of constrained heterogeneous linear systems,” 2020 59th IEEE Conf. on Decision and Control (CDC), pp. 1248-1253, 2020. https://doi.org/10.1109/CDC42340.2020.9303838
- [5] S. E. Li, Y. Zheng, K. Li, and J. Wang, “An overview of vehicular platoon control under the four-component framework,” 2015 IEEE Intelligent Vehicles Symp. (IV), pp. 286-291, 2015. https://doi.org/10.1109/IVS.2015.7225700
- [6] Y. Li and C. He, “Connected autonomous vehicle platoon control considering vehicle dynamic information,” 2018 37th Chinese Control Conf., pp. 7834-7839, 2018. https://doi.org/10.23919/ChiCC.2018.8483514
- [7] X. Wang, Y. Bian, X. Qin, M. Hu, B. Xu, and G. Xie, “Finite-time platoon control of connected and automated vehicles with mismatched disturbances,” 2020 39th Chinese Control Conf., pp. 5613-5618, 2020. https://doi.org/10.23919/CCC50068.2020.9189484
- [8] Y. Li, C. Tang, K. Li, S. Peeta, X. He, and Y. Wang, “Nonlinear finite-time consensus-based connected vehicle platoon control under fixed and switching communication topologies,” Transportation Research Part C: Emerging Technologies, Vol.93, pp. 525-543, 2018. https://doi.org/10.1016/j.trc.2018.06.013
- [9] S. Andoh, K. Kobayashi, and Y. Yamashita, “Hierarchical pinning control for consensus of multi-agent systems and its application to vehicle platooning,” 2020 IEEE/SICE Int. Symp. on System Integration, pp. 1064-1069, 2020. https://doi.org/10.1109/SII46433.2020.9026200
- [10] T. Wakasa and K. Sawada, “Multi-rate switched pinning control for velocity control of vehicle platoons,” IEICE Trans. on Fundamentals of Electronics, Communications and Computer Sciences, Vol.104, No.11, pp. 1461-1469, 2021. https://doi.org/10.1587/transfun.2020KEP0009
- [11] A. Tanaka, K. Kobayashi, and Y. Yamashita, “Virtual merge and split at intersection for vehicle platooning based on self-triggered pinning consensus control,” Advanced Robotics, Vol.37, No.3, pp. 210-219, 2023. https://doi.org/10.1080/01691864.2022.2126731
- [12] L. Li, C. Wang, J. Gan, Y. Zhao, X. Qu, and B. Ran, “Optimizing platoon safety through key node selection in pinning control strategy,” Physica A: Statistical Mechanics and its Applications, Vol.643, Article No.129830, 2024. https://doi.org/10.1016/j.physa.2024.129830
- [13] S.-K. Chang, W.-T. You, and P.-L. Hsu, “Design of general structured observers for linear systems with unknown inputs,” J. of the Franklin Institute, Vol.334, No.2, pp. 213-232, 1997. https://doi.org/10.1016/S0016-0032(96)00077-4
- [14] E. Mousavinejad, F. Yang, Q.-L. Han, Q. Qiu, and L. Vlacic, “Cyber attack detection in platoon-based vehicular networked control systems,” 2018 IEEE 27th Int. Symp. on Industrial Electronics (ISIE), pp. 603-608, 2018. https://doi.org/10.1109/ISIE.2018.8433814
- [15] M. H. Basiri, N. L. Azad, and S. Fischmeister, “Attack resilient heterogeneous vehicle platooning using secure distributed nonlinear model predictive control,” 2020 28th Mediterranean Conf. on Control and Automation (MED), pp. 307-312, 2020. https://doi.org/10.1109/MED48518.2020.9183007
- [16] Y. Yamamoto, N. Kuze, and T. Ushio, “Attack detection and defense system using an unknown input observer for cooperative adaptive cruise control systems,” IEEE Access, Vol.9, pp. 148810-148820, 2021. https://doi.org/10.1109/ACCESS.2021.3124547
- [17] E. Mousavinejad and L. Vlacic, “Secure platooning control of automated vehicles under cyber attacks,” ISA Trans., Vol.127, pp. 229-238, 2022. https://doi.org/10.1016/j.isatra.2022.02.046
- [18] T. Yang, Z. Meng, D. V. Dimarogonas, and K. H. Johansson, “Global consensus for discrete-time multi-agent systems with input saturation constraints,” Automatica, Vol.50, No.2, pp. 499-506, 2014. https://doi.org/10.1016/j.automatica.2013.11.008
- [19] Y. Liu and H. Gao, “Stability, scalability, speedability, and string stability of connected vehicle systems,” IEEE Trans. on Systems, Man, and Cybernetics: Systems, Vol.52, No.5, pp. 2819-2832, 2021. https://doi.org/10.1109/TSMC.2021.3054794
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.