Paper:
Cooperative Merging Control for Heavy-Duty Trucks Based on Linear Quadratic Path-Following Control
Yukiya Tomisawa*, Toshiyuki Sugimachi**, and Toshiaki Sakurai**
*Graduate School of Integrative Science and Engineering, Tokyo City University
1-28-1 Tamatsutsumi, Setagaya-ku, Tokyo 158-8557, Japan
**Department of Mechanical Engineering, Faculty of Science and Engineering, Tokyo City University
1-28-1 Tamatsutsumi, Setagaya-ku, Tokyo 158-8557, Japan

The Japanese logistics industry has been actively researching and developing autonomous trucks to address challenges such as truck driver shortages and increasing transportation demands. In particular, infrastructure-coordinated autonomous driving has gained attention, leading to the development of systems that assist merging by providing real-time information on mainline vehicles to automated trucks via sensors installed at merging points. This approach is expected to reduce traffic congestion and enhance safety during merging. In this study, we propose a merging control algorithm that integrates path-following control based on optimal control theory with infrastructure coordination to facilitate the merging of automated trucks and optimize traffic flow. Simulation results demonstrate that the proposed algorithm ensures highly accurate path following, improves the merging success rate, and reduces merging start time.
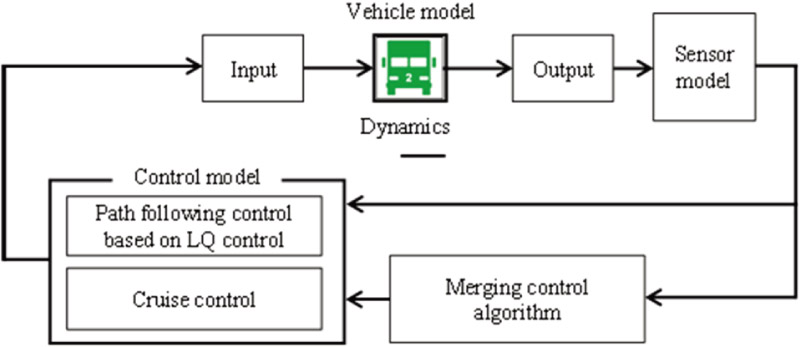
Simulation overview
- [1] T. D. Chu, T. Miwa, and T. Morikawa, “An analysis of merging maneuvers at urban expressway merging sections,” Procedia – Social and Behavioral Sciences, Vol.138, pp. 105-115, 2014. https://doi.org/10.1016/j.sbspro.2014.07.186
- [2] S. E. Shladover, X.-Y. Lu, and B. Song, “Demonstration of automated heavy-duty vehicles,” California Partners for Advanced Transportation Technology, 2006.
- [3] T. Hashimoto and H. Yanagisawa, “Modeling individual differences in risk feeling of autonomous driving behavior with a prediction error,” J. of Advanced Mechanical Design, Systems, and Manufacturing, Vol.14, No.6, Article No.JAMDSM0078, 2020. https://doi.org/10.1299/jamdsm.2020jamdsm0078
- [4] A. Muraleedharan, H. Okuda, and T. Suzuki, “Path tracking control using model predictive control with on GPU implementation for autonomous driving,” J. of Arid Land Studies, pp. 163-167, 2018.
- [5] S. Matsumoto and M. Saito, “Adaptive identification method for vehicle driving model capable of driving with large acceleration changes and steering,” J. Adv. Comput. Intell. Intell. Inform., Vol.27, No.4, pp. 610-614, 2023. https://doi.org/10.20965/jaciii.2023.p0609
- [6] H. Makino, K. Tamada, K. Sakai, and S. Kamijo, “Solutions for urban traffic issues by ITS technologies,” IATSS Research, Vol.42, pp. 49-60, 2018. https://doi.org/10.1016/j.iatssr.2018.05.003
- [7] K. Sakai, “Public transport promotion and mobility-as-a-service,” IEICE Trans. on Fundamentals of Electronics, Communications and Computer Sciences, Vol.E103-A, pp. 226-230, 2020. https://doi.org/10.1587/transfun.2019TSI0001
- [8] T. Horimatsu, “ITS sensor for railroad crossing safety,” FUJITSU Science and Technology J., Vol.43, No.2, pp. 220-225, 2007.
- [9] L. Yang, D. Park, N. Kim, S. Lyu, and T. Kim, “Analysis of the impact of speed trajectory optimization on energy consumption during highway merging,” IEEE Access, Vol.12, pp. 173243-173254, 2024. https://doi.org/10.1109/ACCESS.2024.3501315
- [10] H. Sekiya, R. Nakata, T. Nakagawa, S. Itsubo, and Y. Iwasato, “Development of a merging support system for automated vehicles,” 16th REAAA Conf., 2021.
- [11] T. Daimon, H. Makino, H. Mizutani, and Y. Munehiro, “Study on safety assist information of advanced cruise-assist highway systems (AHS) using VICS in blind curve section of urban expressway,” J. of Mechanical Systems for Transportation and Logistics, Vol.1, No.2, pp. 192-202, 2008. https://doi.org/10.1299/jmtl.1.192
- [12] H. B. Pacejka, “Tire and Vehicle Dynamics,” Butterworth-Heinemann, 2002.
- [13] T. Hiraoka and S. Takada, “Collision risk evaluation based on deceleration for collision avoidance,” Trans. of the Society of Instrument and Control Engineers, Vol.47, No.11, pp. 534-540, 2011. https://doi.org/10.9746/sicetr.47.534
- [14] K. Kitajima, M. Yamamoto, and Y. Hayakawa, “Approach for Realization of Merging Point Support System as Cooperative ITS,” Mitsubishi Heavy Industries Technical Review, Vol.57, No.2, 2020 (in Japanese).
- [15] S. Shoji, T. Sugimachi, T. Sakurai, T. Maki, H. Sakai, J. Zhu, and Y. Miyano, “Application of model-based development in truck platooning,” FAST-zero’21, 6th Int. Symp. on Future Active Safety Technology Toward Zero Traffic Accidents, 2021.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.