Paper:
Quantifying Trade-Offs in Autonomous Driving with a DRL-Based Multi-Objective Control System via the SVC
Uta Kawakami*
 and Kenji Sawada**
and Kenji Sawada**
*The University of Electro-Communications
1-5-1 Choufugaoka, Chofu, Tokyo 182-8585, Japan
**The University of Osaka
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan

Advancing autonomous driving technology demands balancing multiple evaluation metrics, including ride comfort, energy efficiency, and vehicle performance. This study presents a novel steering control system that incorporates the 6-DoF-SVC model into the reward function of a DDPG framework, enabling the optimization of ride comfort while preserving energy efficiency and vehicle performance. The proposed system utilizes a hybrid architecture combining DRL-based decision-making with a PI controller, allowing flexible trade-offs among evaluation metrics. Numerical experiments conducted in MATLAB and Simulink under varying ride comfort thresholds (thsvc) demonstrate that appropriate thsvc settings can simultaneously enhance ride comfort and either energy efficiency or vehicle performance, depending on operational objectives. Additionally, the study identifies a significant trade-off between steering effort and ride comfort, indicating that specific thsvc settings permit the simultaneous optimization of both. However, challenges such as oscillatory behavior during lane changes were observed, highlighting potential areas for improvement. This research provides valuable insights for designing autonomous vehicle control systems that address competing objectives. Future work will focus on dynamic velocity planning, integrating more realistic driving scenarios, and validating system performance in dynamic environments involving other vehicles and pedestrians. By addressing these challenges, the proposed system aims to improve the safety, efficiency, and comfort of autonomous driving solutions.
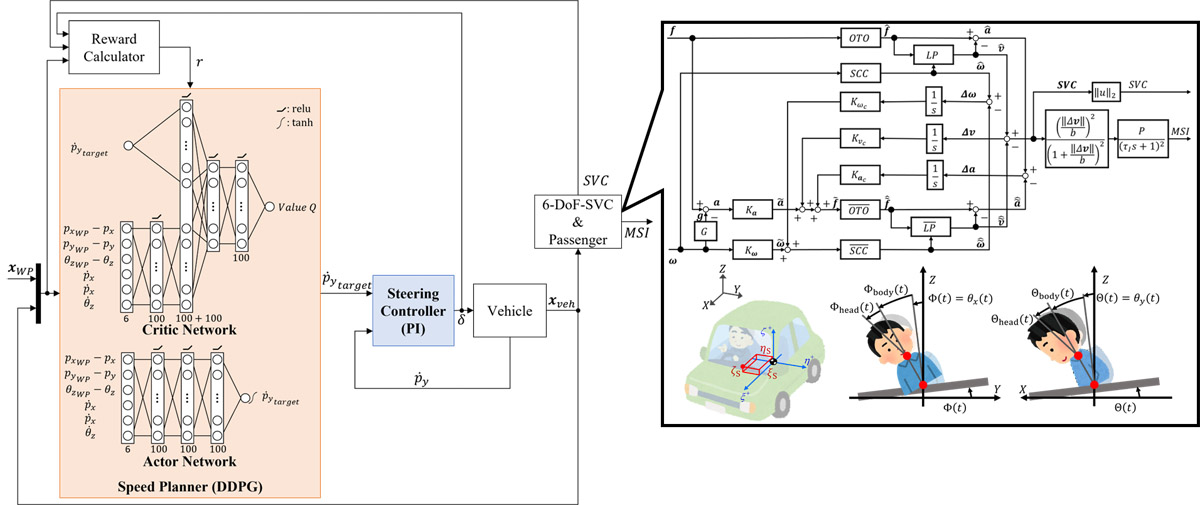
DDPG-based steering control system with 6-DoF SVC model
- [1] H. Yoshida, M. Omae, and T. Wada, “Toward next active safety technology of intelligent vehicle,” J. Robot. Mechatron., Vol.27, No.6, pp. 610-616, 2015. https://doi.org/10.20965/jrm.2015.p0610
- [2] Y. Minami, H. Okajima, K. Sawada, and K. Sekiguchi, “Special issue on navigation and control technologies for autonomous mobility,” J. Robot. Mechatron., Vol.35, No.2, pp. 229-230, 2023. https://doi.org/10.20965/jrm.2023.p0229
- [3] Y. Zhang, T. You, J. Chen, C. Du, Z. Ai, and X. Qu, “Safe and energy-saving vehicle-following driving decision-making framework of autonomous vehicles,” IEEE Trans. on Industrial Electronics, Vol.69, No.12, pp. 13859-13871, 2022. https://doi.org/10.1109/TIE.2021.3125562
- [4] S. A. Saruchi et al., “A brief review on motion sickness for autonomous vehicle,” Enabling Industry 4.0 through Advances in Mechatronics, pp. 275-284, 2022. https://doi.org/10.1007/978-981-19-2095-0_24
- [5] K. Arai et al., “Vehicle simulation-based quantitative evaluation for power consumption and ride comfort,” SEI Technical Review, No.87, pp. 10-14, 2018.
- [6] R. Lattarulo, E. Martí, M. Marcano, J. Matute, and J. Pérez, “A speed planner approach based on bézier curves using vehicle dynamic constrains and passengers comfort,” 2018 IEEE Int. Symposium on Circuits and Systems (ISCAS), 2018. https://doi.org/10.1109/ISCAS.2018.8351307
- [7] F. Mohseni, J. Åslund, E. Frisk, and L. Nielsen, “Fuel and comfort efficient cooperative control for autonomous vehicles,” 2017 IEEE Intelligent Vehicles Symposium (IV), pp. 1631-1636, 2017. https://doi.org/10.1109/IVS.2017.7995943
- [8] A. Kuchiki and T. Namerikawa, “Cooperative control of connected and automated vehicles at signal-free intersections considering passenger comfort,” 2022 61st Annual Conf. of the Society of Instrument and Control Engineers (SICE), pp. 909-914, 2022. https://doi.org/10.23919/SICE56594.2022.9905760
- [9] H. Woo, H. Tetsuka, and J. Gwak, “Automatic lane-changing system on congested highway,” J. Robot. Mechatron., Vol.36, No.3, pp. 779-786, 2024. https://doi.org/10.20965/jrm.2024.p0779
- [10] J. H. Yang, D. J. Kim, and C. C. Chung, “Predictive collision avoidance control with optimized ride comfort in vehicle lateral motion control,” 2020 20th Int. Conf. on Control, Automation and Systems (ICCAS), pp. 737-742, 2020. https://doi.org/10.23919/ICCAS50221.2020.9268424
- [11] F. Wang, K. Sagawa, and H. Inooka, “A study of the relationship between the longitudinal acceleration/deceleration of automobiles and ride comfort,” The Japanese J. of Ergonomics, Vol.36, No.4, pp. 191-200, 2000 (in Japanese). https://doi.org/10.5100/jje.36.191
- [12] N. Kamiji, Y. Kurata, T. Wada, and S. Doi, “Modeling and validation of carsickness mechanism,” SICE Annual Conf. 2007, pp. 1138-1143, 2007. https://doi.org/10.1109/SICE.2007.4421156
- [13] S. Triest, A. Villaflor, and J. M. Dolan, “Learning highway ramp merging via reinforcement learning with temporally-extended actions,” Proc. of IEEE Intelligent Vehicles Symp. (IV ’20), pp. 1595-1600, 2020. https://doi.org/10.1109/IV47402.2020.9304841
- [14] T. Todaka, K. Sato, K. Sawada, and K. Sando, “Cost function tuning for ideal vehicle motion planning considering motion sickness,” Proc. of the Thirtieth Int. Symp. on Artificial Life and Robotics (AROB 30th 2025), the Tenth Int. Symp. on BioComplexity (ISBC 10th 2025), 2025.
- [15] R. Moriyasu, “Issues and countermeasures for model predictive control based on machine learning models: A case study of engine airpath control,” J. of The Society of Instrument and Control Engineers, Vol.62, No.3, pp. 150-154, 2023 (in Japanese). https://doi.org/10.11499/sicejl.62.150
- [16] U. Kawakami and K. Sawada, “Steering control considering motion sickness and vehicle performance via ddpg algorithm and 6-dof-svc model,” 2024 IEEE Int. Conf. on Systems, Man, and Cybernetics (SMC), pp. 1302-1307, 2024. https://doi.org/10.1109/SMC54092.2024.10831355
- [17] W. Bles, J. E. Bos, B. De Graaf, E. Groen, and A. H. Wertheim, “Motion sickness: Only one provocative conflict?,” Brain Research Bulletin, Vol.47, No.5, pp. 481-487, 1998. https://doi.org/10.1016/s0361-9230(98)00115-4
- [18] C. M. Oman, “A heuristic mathematical model for the dynamics of sensory conflict and motion sickness,” Acta Otolaryngol Suppl, Vol.392, pp. 1-44, 1982. https://doi.org/10.3109/00016488209108197
- [19] J. O’Hanlon and M. McCauley, “Motion sickness incidence as a function of vertical sinusoidal motion,” Aerospace Medicine, Vol.45, pp. 366-369, 1974.
- [20] N. Kamiji, T. Maruo, and T. Wada, “Research on modeling of carsickness based on passenger’s motion perception characteristics,” Trans. of the Society of Automotive Engineers of Japan, Vol.39, No.2, pp. 381-386, 2008 (in Japanese).
- [21] T. Wada, J. Kawano, Y. Okafuji, A. Takamatsu, and M. Makita, “A computational model of motion sickness considering visual and vestibular information,” 2020 IEEE Int. Conf. on Systems, Man, and Cybernetics (SMC), pp. 1758-1763, 2020. https://doi.org/10.1109/SMC42975.2020.9283350
- [22] Y. Tamura, T. Wada, and H. Liu, “Generating visual information for motion sickness reduction using a computational model based on svc theory,” 2023 IEEE 26th Int. Conf. on Intelligent Transportation Systems (ITSC), pp. 5066-5071, 2023. https://doi.org/10.1109/ITSC57777.2023.10422244
- [23] T. Todaka, K. Sato, K. Sawada, and K. Sando, “Vehicle motion planning for ride comfort using subjective vertical conflict model,” IFAC-PapersOnLine, Vol.58, No.18 (8th IFAC Conf. on Nonlinear Model Predictive Control (NMPC 2024)), pp. 407-414, 2024. https://doi.org/10.1016/j.ifacol.2024.09.060
- [24] H. Liu, S. Inoue, and T. Wada, “Subjective vertical conflict model with visual vertical: Predicting motion sickness on autonomous personal mobility vehicles,” IEEE Trans. on Intelligent Transportation Systems, Vol.25, No.8, pp. 9878-9894, 2024. https://doi.org/10.1109/TITS.2024.3357170
- [25] T. Wada, S. Fujisawa, and S. Doi, “Analysis of driver’s head tilt using a mathematical model of motion sickness,” Int. J. of Industrial Ergonomics, Vol.63, pp. 89-97, 2018. https://doi.org/10.1016/j.ergon.2016.11.003
- [26] R. S. Sutton and A. G. Barto, “Reinforcement Learning, second edition: An Introduction,” MIT Press, 2018.
- [27] J. Lubars, H. Gupta, S. Chinchali, L. Li, A. Raja, R. Srikant, and X. Wu, “Combining reinforcement learning with model predictive control for on-ramp merging,” 2021 IEEE Int. Intelligent Transportation Systems Conf. (ITSC), pp. 942-947, 2021. https://doi.org/10.1109/ITSC48978.2021.9564954
- [28] S. Siboo, A. Bhattacharyya, R. Naveen Raj, and S. H. Ashwin, “An empirical study of ddpg and ppo-based reinforcement learning algorithms for autonomous driving,” IEEE Access, Vol.11, pp. 125094-125108, 2023. https://doi.org/10.1109/ACCESS.2023.3330665
- [29] T. Wu, H. Ye, Z. Xiang, and X. Yang, “Speed and heading control of an unmanned surface vehicle using deep reinforcement learning,” 2023 IEEE 12th Data Driven Control and Learning Systems Conf. (DDCLS), pp. 573-578, 2023. https://doi.org/10.1109/DDCLS58216.2023.10166143
- [30] Ministry of Land, Infrastructure, Transport and Tourism, Japan, “Road Structure Ordinance,” Government of Japan, 1970.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.