Paper:
Modeling and Experimental Analysis for Screw Loosening Detection Using a High-Speed Robotic Hand
Yukihiro Magara, Taku Senoo
 , and Atsushi Konno
, and Atsushi Konno
Graduate School of Information Science and Technology, Hokkaido University
Kita 14, Nishi 9, Kita-ku, Sapporo, Hokkaido 060-0814, Japan

High-speed robotic hands are capable of agile movements and short-cycle control and can perform a variety of actions that are not possible with ordinary robotic hands. In this study, this characteristic is focused on and verified for the construction of an algorithm to detect screw loosening from force sensor data acquired when an object is vibrated at high-speeds. First, a simple model of the system was developed by applying vibrations to a part connected by a screw to a robotic hand. Based on the constructed model, simulations were performed to confirm weather the presence or absence of screw loosening influenced force data. Subsequently, experiments were conducted using a robotic hand and models to verify the differences caused by screw loosening. These results confirmed the differences in the force data available for detecting screw loosening. Furthermore, to confirm the reliability of the constructed model and consider the inspection method, the grasping position of the inspected object was added as a condition for verification. This additional experiment confirmed that there were significant changes in the force data depending on the grasping position. Additionally, the optimal grasping conditions for the inspection method were discussed, and the validity of the method was confirmed based on simple discrimination results. In the future, simulations using models with extended degrees of freedom, along with further experimental verification, will be conducted to develop more accurate inspection methods.
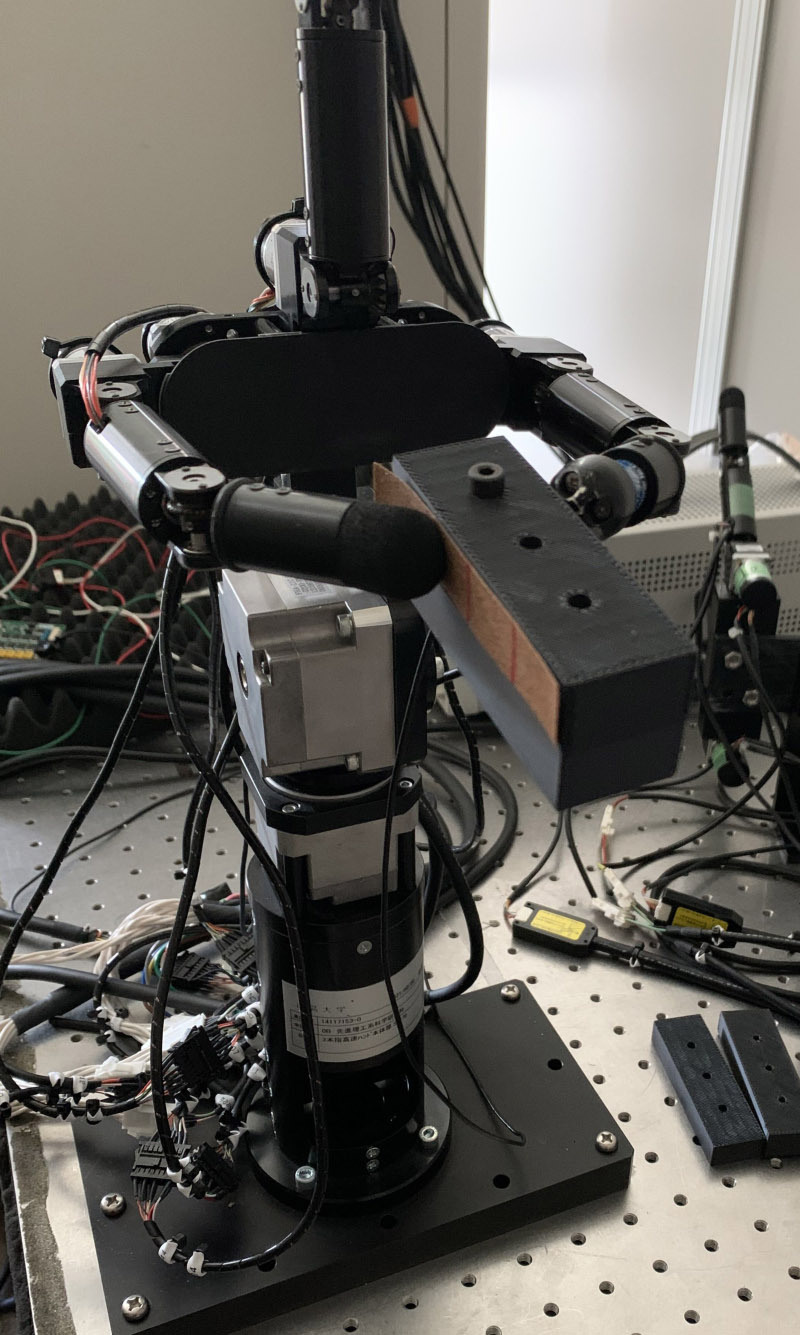
Image of inspection system using robot hand
- [1] H. M. Do, C. Park, and J. H. Kyung, “Dual arm robot for packaging and assembling of IT products,” 2012 IEEE Int. Conf. on Automation Science and Engineering (CASE), pp. 1067-1070, 2012. https://doi.org/10.1109/CoASE.2012.6386417
- [2] J. Krüger, G. Schreck, and D. Surdilovic, “Dual arm robot for flexible and cooperative assembly,” CIRP Annals, Vol.60, Issue 1, pp. 5-8, 2011. https://doi.org/10.1016/j.cirp.2011.03.017
- [3] T. Yoshikawa, “Multifingered robot hands: Control for grasping and manipulation,” Annual Reviews in Control, Vol.34, Issue 2, pp. 199-208, 2010. https://doi.org/10.1016/j.arcontrol.2010.09.001
- [4] H. Kawasaki, T. Komatsu, and K. Uchiyama, “Dexterous anthropomorphic robot hand with distributed tactile sensor: Gifu hand II,” IEEE/ASME Trans. on Mechatronics, Vol.7, Issue 3, pp. 296-303, 2002. https://doi.org/10.1109/TMECH.2002.802720
- [5] J. Tanaka, “Three-Fingered Robot Hand with Gripping Force Generating Mechanism Using Small Gas Springs – Mechanical Design and Basic Experiments –,” J. Robot. Mechatron., Vol.31, No.1, pp. 118-134, 2019. https://doi.org/10.20965/jrm.2019.p0118
- [6] G. R. Toth, “Controlled Tightening Over the Yield Point of a Screw: Based on Taylor’s Series Expansions,” J. Pressure Vessel Technol., Vol.125, Issue 4, pp. 460-466, 2003. https://doi.org/10.1115/1.1613299
- [7] M. Fukuda and K. Imano, “Detection of a second harmonic ultrasonic component generated from a fastened bolt using a double-layered piezoelectric transducer,” IEICE Electronics Express, Vol.6, Issue 20, pp. 1438-1443, 2009. https://doi.org/10.1587/elex.6.1438
- [8] T. Wang, G. Song, S. Liu, Y. Li, and H. Xiao, “Review of Bolted Connection Monitoring,” Int. J. of Distributed Sensor Networks, Vol.9, No.12, Article No.871213, 2013. https://doi.org/10.1155/2013/871213
- [9] N. Hosoya, T. Niikura, S. Hashimura, I. Kajiwara, and F. Giorgio-Serchi, “Axial force measurement of the bolt/nut assemblies based on the bending mode shape frequency of the protruding thread part using ultrasonic modal analysis,” Measurement: J. of the Int. Measurement Confederation, Vol.162, Article No.107914, 2020. https://doi.org/10.1016/j.measurement.2020.107914
- [10] K.-Y. Jhang, H.-H. Quan, J. Ha, and N.-Y. Kim, “Estimation of clamping force in high-tension bolts through ultrasonic velocity measurement,” Ultrasonics, Vol.44, Supplement 22, pp. e1339-e1342, 2006. https://doi.org/10.1016/j.ultras.2006.05.190
- [11] M. Hirao, H. Ogi, and H. Yasui, “Contactless measurement of bolt axial stress using a shear-wave electromagnetic acoustic transducer,” NDT & E Int., Vol.34, Issue 3, pp. 179-183, 2001. https://doi.org/10.1016/S0963-8695(00)00055-4
- [12] T. S. Newman and A. K. Jain, “A survey of automated visual inspection,” Computer Vision and Image Understanding, Vol.61, Issue 2, pp. 231-262, 1995. https://doi.org/10.1006/cviu.1995.1017
- [13] Y. Sun, M. Li, R. Dong, W. Chen, and D. Jiang, “Vision-Based Detection of Bolt Loosening Using YOLOv5,” Sensors, Vol.22, Issue 14, Article No.5184, 2022. https://doi.org/10.3390/s22145184
- [14] H. Gong, X. Deng, J. Liu, and J. Huang, “Quantitative loosening detection of threaded fasteners using vision-based deep learning and geometric imaging theory,” Automation in Construction, Vol.133, Article No.104009, 2022. https://doi.org/10.1016/j.autcon.2021.104009
- [15] N. Yusa and S. Sawada, “Demonstration of low-frequency vibration tests to evaluate bolt loosening,” Int. J. of Applied Electromagnetics and Mechanics, Vol.52, Issues 1-2, pp. 89-94, 2016. https://doi.org/10.3233/JAE-162070
- [16] N. Furukawa, A. Namiki, T. Senoo, and M. Ishikawa, “Dynamic regrasping using a high-speed multifingered hand and a high-speed vision system,” Proc. of 2006 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 181-187, 2006. https://doi.org/10.1109/ROBOT.2006.1641181
- [17] T. Senoo, A. Konno, H. Otsubo, and I. Ishii, “Rotational Regrasping For a Stick-type Object Using Inertial Force Based on High-speed Swing-up Motion,” Proc. of 2023 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), 2023. https://doi.org/10.1109/ROBIO58561.2023.10354736
- [18] F. Shimada, K. Murakami, T. Senoo, and M. Ishikawa, “Bolt Loosening Detection Using Multi-Purpose Robot Hand,” Proc. of 2020 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), pp. 1860-1866, 2020. https://doi.org/10.1109/AIM43001.2020.9158887
- [19] M. W. Spong, S. Hutchinson, and M. Vidyasagar, “Robot Modeling and Control (1st ed.),” John Wiley & Sons Inc., 2005.
- [20] P. Rocco, “Stability of PID control for industrial robot arms,” IEEE Trans. on Robotics and Automation, Vol.12, Issue 4, pp. 606-614, 1996. https://doi.org/10.1109/70.508444
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.