Paper:
Robotic Wear with Pneumatic Actuators to Assist/Improve Sideways Balance During Walking: Part 1—Prototype Development
Kunihiro Ogata*
 , Tianyi Zhu*,**, Masahiro Fujimoto*
, Shoma Kudo*
, and Yoshio Matsumoto*,***
, Tianyi Zhu*,**, Masahiro Fujimoto*
, Shoma Kudo*
, and Yoshio Matsumoto*,***
*Human Augmentation Research Center, National Institute of Advanced Industrial Science and Technology (AIST)
6-2-3 Kashiwanoha, Kashiwa, Chiba 277-0882, Japan
**Department of Human and Engineered Environmental Studies, Graduate School of Frontier Sciences, The University of Tokyo
6-2-3 Kashiwanoha, Kashiwa, Chiba 277-0882, Japan
***Tokyo University of Science
6-3-1 Niijuku, Katsushika-ku, Tokyo 125-8585, Japan

Welfare assistive devices and robotic devices have been developed to assist the elderly and people/individuals with disabilities in walking. For the elderly and people with disabilities to achieve stable walking, the development of wearable robots to support the shift of the center of mass to the left and right during walking is important. Therefore, in this study, we developed a wearable robot to improve walking function through a haptic presentation. The wearable robot is equipped with a pneumatic actuator that enables haptic presentation and an inertial measurement unit (IMU) for estimating walking events. Walking support in real-time is hypothesized to be possible through this wearable robot. We verified the effectiveness of haptic presentation and developed a walking-event estimation algorithm using the IMU. From the experimental results, left and right center of pressure (CoP) changes were confirmed to be possible through haptic presentation; moreover, walking events can be estimated by the IMU attached to the waist.
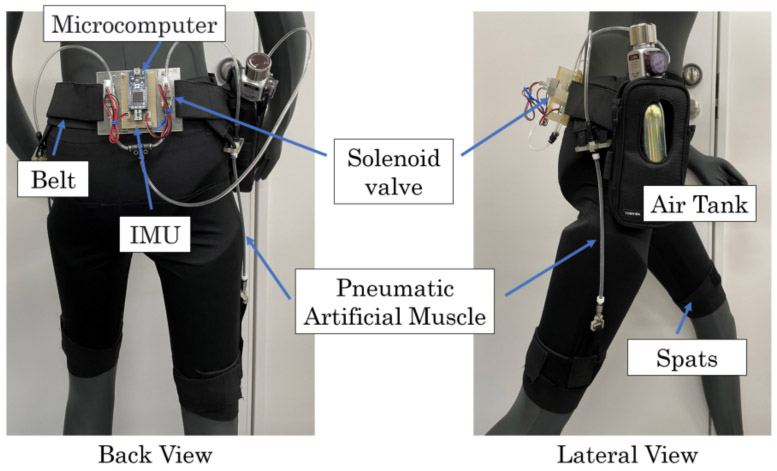
Developed robot wear
- [1] M. J. Hilliard, K. M. Martinez, I. Janssen, B. Edwards, M.-L. Mille, Y. Zhang, and M. W. Rogers, “Lateral balance factors predict future falls in community-living older adults,” Archives of Physical Medicine and Rehabilitation, Vol.89, No.9, pp. 1708-1713, 2008. https://doi.org/10.1016/j.apmr.2008.01.023
- [2] W. Li, T. H. M. Keegan, B. Sternfeld, S. Sidney, C. P. Quesenberry Jr., and J. L. Kelsey, “Outdoor falls among middle-aged and older adults: A neglected public health problem,” American J. of Public Health, Vol.96, No.7, pp. 1192-1200, 2006. https://doi.org/10.2105/AJPH.2005.083055
- [3] W. C. Mann, C. Granger, D. Hurren, M. Tomita, and B. Charvat, “An analysis of problems with canes encountered by elderly persons,” Physical & Occupational Therapy in Geriatrics, Vol.13, Nos.1-2, pp. 25-49, 1995. https://doi.org/10.1080/J148v13n01_02
- [4] B. E. Maki, P. J. Holliday, and A. K. Topper, “A prospective study of postural balance and risk of falling in an ambulatory and independent elderly population,” J. of Gerontology, Vol.49, No.2, pp. M72-M84, 1994. https://doi.org/10.1093/geronj/49.2.m72
- [5] M. Fujimoto and L.-S. Chou, “Sagittal plane momentum control during walking in elderly fallers,” Gait & Posture, Vol.45, pp. 121-126, 2016. https://doi.org/10.1016/j.gaitpost.2016.01.009
- [6] M. W. Rogers and M.-L. Mille, “Lateral stability and falls in older people,” Exercise and Sport Sciences Reviews, Vol.31, No.4, pp. 182-187, 2003. https://doi.org/10.1097/00003677-200310000-00005
- [7] M. Inacio, A. S. Ryan, W.-N. Bair, M. Prettyman, B. A. Beamer, and M. W. Rogers, “Gluteal muscle composition differentiates fallers from nonfallers in community dwelling older adults,” BMC Geriatrics, Vol.14, No.1, Article No.37, 2014. https://doi.org/10.1186/1471-2318-14-37
- [8] M. Wehner, B. Quinlivan, P. M. Aubin, E. Martinez-Villalpando, M. Baumann, L. Stirling, K. Holt, and R. Wood, “A Lightweight Soft Exosuit for Gait Assistance,” 2013 IEEE Int. Conf. on Robotics and Automation (ICRA2013), pp. 3362-3369, 2013. https://doi.org/10.1109/ICRA.2013.6631046
- [9] A. Higuchi, J. Shiraishi, Y. Kurita, and T. Shibata, “Effects of Gait Inducing Assist for Patients with Parkinson’s Disease on Double Support Phase During Gait,” J. Robot. Mechatron., Vol.32, No.4, pp. 798-811, 2020. https://doi.org/10.20965/jrm.2020.p0798
- [10] K. Murakami, S. W. John, M. Komatsu, and S. Adachi, “External control of walking direction, using cross-wire mobile assist suit,” 2017 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS2017), pp. 1046-1051, 2017. https://doi.org/10.1109/IROS.2017.8202273
- [11] S. W. John, K. Murakami, M. Komatsu, and S. Adachi, “Cross-wire assist suit concept, for mobile and lightweight multiple degree of freedom hip assistance,” 2017 Int. Conf. on Rehabilitation Robotics (ICORR2017), pp. 387-393, 2017. https://doi.org/10.1109/ICORR.2017.8009278
- [12] A. Dwivedi, L. Gerez, W. Hasan, C. Yang, and M. Liarokapis, “A Soft Exoglove Equipped with a Wearable Muscle-Machine Interface Based on Forcemyography and Electromyography,” IEEE Robotics and Automation Letters, Vol.4, No.4, pp. 3240-3246, 2019. https://doi.org/10.1109/LRA.2019.2925302
- [13] C. Neill, N. Phipps, L. Cappello, S. Paganoni, and C. J. Walsh, “A Soft Wearable Robot for the Shoulder: Design, Characterization, and Preliminary Testing,” 2017 Int. Conf. on Rehabilitation Robotics (ICORR2017), pp. 1672-1678, 2017. https://doi.org/10.1109/ICORR.2017.8009488
- [14] K. Berg, “Measuring balance in the elderly: Preliminary development of an instrument,” Physiotherapy Canada, Vol.41, No.6, pp. 304-311, 1989. https://doi.org/10.3138/ptc.41.6.304
- [15] S. R. Lord, M. W. Rogers, A. Howland, and R. Fitzpatrick, “Lateral stability, sensorimotor function and falls in older people,” J. of the American Geriatrics Society, Vol.47, No.9, pp. 1077-1081, 1999. https://doi.org/10.1111/j.1532-5415.1999.tb05230.x
- [16] W. Zijlstra, “Assessment of spatio-temporal parameters during unconstrained walking,” European J. of Applied Physiology, Vol.92, Nos.1-2, pp. 39-44, 2004. https://doi.org/10.1007/s00421-004-1041-5
- [17] A. D. Kuo, “The six determinants of gait and the inverted pendulum analogy: A dynamic walking perspective,” Human Movement Science, Vol.26, No.4, pp. 617-656, 2007. https://doi.org/10.1016/j.humov.2007.04.003
- [18] F. Parisi, G. Ferrari, A. Baricich, M. D’Innocenzo, C. Cisari, and A. Mauro, “Accurate gait analysis in post-stroke patients using a single inertial measurement unit,” 2016 IEEE 13th Int. Conf. on Wearable and Implantable Body Sensor Networks (BSN), pp. 335-340, 2016. https://doi.org/10.1109/BSN.2016.7516284
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.