Paper:
Experimental and Numerical Analysis of Turn Flight Dynamics Driven by a Butterfly-Inspired Lead-Lag Actuation for MAV
Hajime Endo*, Taro Fujikawa*
 , and Koki Kikuchi**
, and Koki Kikuchi**
*Doctoral Program of Advanced Multidisciplinary Engineering, Graduate School of Advanced Science and Technology, Tokyo Denki University
5 Senju Asahi-cho, Adachi-ku, Tokyo 120-8551, Japan
**Department of Advanced Robotics, Faculty of Advanced Engineering, Chiba Institute of Technology
2-17-1 Tsudanuma Narashino, Chiba 275-0016, Japan

To realize the turning motion of the micro aerial vehicle, we developed a mechanism that reproduces the lead-lag motion of a butterfly. The effectiveness of this mechanism was verified through flight experiments and numerical simulations of a glider equipped with this mechanism. Butterflies turn using the lead-lag motion, which involves moving the left and right wings back and forth. In this study, we developed a mechanism to achieve this lead-lag motion using a shape memory alloy actuator based on our butterfly-type flapping robot. The mechanism was implemented in a butterfly-shaped glider, and flight experiments and numerical simulation analysis with computational fluid dynamics were conducted. The results of 3D motion analysis using multiple high-speed cameras revealed that the developed lead-lag mechanism allows the left and right wings to have different lead-lag angles during glide flight. This mechanism was confirmed to enable the right turn by increasing the lead-lag angle of the left wing as well as the left turn by increasing the lead-lag angle of the right wing. Numerical simulation analysis demonstrated that changes in the left and right lead-lag angles generated yawing and rolling moments, respectively, and that this produced turning motion with a change in the yaw angle.
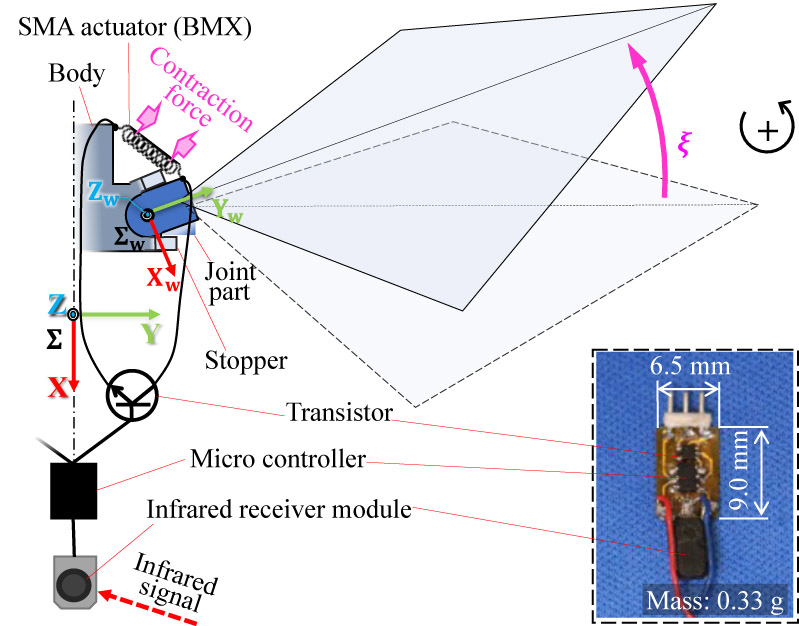
Lead-lag mechanism configuration
- [1] S. Hensel, M. B. Marinov, A. Dreher, and D. Trendafilov, “Monocular depth estimation for autonomous uav navigation based on deep learning,” 2023 XXXII Int. Scientific Conf. Electronics (ET), 2023. https://doi.org/10.1109/ET59121.2023.10279533
- [2] Y. Xue and W. Chen, “A uav navigation approach based on deep reinforcement learning in large cluttered 3d environments,” IEEE Trans. on Vehicular Technology, Vol.72, No.3, pp. 3001-3014, 2023. https://doi.org/10.1109/TVT.2022.3218855
- [3] Y. Govdeli, A. T. Tran, and E. Kayacan, “Multiple modeling and fuzzy switching control of fixed-wing vtol tilt-rotor uav,” Proc. of the 2019 Joint World Congress of the Int. Fuzzy Systems Association and the Annual Conf. of the North American Fuzzy Information Processing Society (IFSA/NAFIPS’2019), pp. 270-284, 2019. https://doi.org/10.1007/978-3-030-21920-8_25
- [4] K. K. S. Kumar, H. Arya, and A. Joshi, “Longitudinal control of agile fixed-wing uav using backstepping,” 2019 IEEE Aerospace Conf., 2019. https://doi.org/10.1109/AERO.2019.8742162
- [5] M. Karásek, A. J. Koopmans, S. F. Armanini, B. D. W. Remes, and G. C. E. de Croon, “Free flight force estimation of a 23.5 g flapping wing mav using an on-board imu,” 2016 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 4963-4969, 2016. https://doi.org/10.1109/IROS.2016.7759729
- [6] F.-Y. Hsiao, L.-J. Yang, S.-H. Lin, C.-L. Chen, and J.-F. Shen, “Autopilots for ultra lightweight robotic birds: Automatic altitude control and system integration of a sub-10 g weight flapping-wing micro air vehicle,” IEEE Control Systems Magazine, Vol.32, No.5, pp. 35-48, 2012. https://doi.org/10.1109/MCS.2012.2205475
- [7] H. Bao, W. Yang, D. Ma, W. Song, and B. Song, “Numerical simulation of flapping airfoil with alula,” Int. J. of Micro Air Vehicles, Vol.12, 2020. https://doi.org/10.1177/1756829320977989
- [8] S. Liu and J. Sun, “Design and research of flapping-wing aircraft based on linear module actuator,” 2023 Int. Conf. on Applied Physics and Computing (ICAPC), pp. 254-258, 2023. https://doi.org/10.1109/ICAPC61546.2023.00054
- [9] K. Yajai, K. Sukvichai, and N. Thongton, “Kinetics analysis of a flapping wing uav based on the four bar linkages mechanism,” 2022 19th Int. Conf. on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), 2022. https://doi.org/10.1109/ECTI-CON54298.2022.9795551
- [10] C. Dileo and X. Deng, “Design of and experiments on a dragonfly-inspired robot,” Advanced Robotics, Vol.23, Nos.7-8, pp. 1003-1021, 2009. https://doi.org/10.1163/156855309X443160
- [11] S. B. Fuller, M. Karpelson, A. Censi, K. Y. Ma, and R. J. Wood, “Controlling free flight of a robotic fly using an onboard vision sensor inspired by insect ocelli,” J. of The Royal Society Interface, Vol.11, No.97, Article No.20140281, 2014. https://doi.org/10.1098/rsif.2014.0281
- [12] Z. Tu, F. Fei, and X. Deng, “Untethered flight of an at-scale dual-motor hummingbird robot with bio-inspired decoupled wings,” IEEE Robotics and Automation Letters, Vol.5, No.3, pp. 4194-4201, 2020. https://doi.org/10.1109/LRA.2020.2974717
- [13] E. D. Margerie, J.-B. Mouret, S. Doncieux, J.-A. Meyer, T. Ravasi, P. Martinelli, and C. Grand, “Flapping-wing flight in bird-sized uavs for the robur project: From an evolutionary optimization to a real flapping-wing mechanism,” 3rd US-European Competition and Workshop on Micro Air Vehicle Systems (MAV07) & European Micro Air Vehicle Conf. and Flight Competition (EMAV2007), 2007.
- [14] C. Rao, T. Ikeda, T. Nakata, and H. Liu, “Owl-inspired leading-edge serrations play a crucial role in aerodynamic force production and sound suppression,” Bioinspiration & Biomimetics, Vol.12, No.4, Article No.046008, 2017. https://doi.org/10.1088/1748-3190/aa7013
- [15] T. Fujikawa, Y. Sato, Y. Makata, T. Yamashita, and K. Kikuchi, “Motion analysis of butterfly-style flapping robot for different wing and body design,” 2008 IEEE Int. Conf. on Robotics and Biomimetics, pp. 216-221, 2009. https://doi.org/10.1109/ROBIO.2009.4913006
- [16] Y. Teranishi and T. Fujikawa, “Development of a 2g butterfly-style flapping-wing micro aerial vehicle,” Int. Robotics & Automation J., Vol.10, No.1, pp. 1-3, 2024. https://doi.org/10.15406/iratj.2024.10.00275
- [17] K. Sanuki and T. Fujikawa, “Motion analysis of butterfly-style flapping robot using cfd based on 3d-cad model and experimental flight data,” J. Robot. Mechatron., Vol.33, No.2, pp. 216-222, 2021. https://doi.org/10.20965/jrm.2021.p0216
- [18] M. H. Rosen, G. Le Pivain, R. Sahai, N. T. Jafferis, and R. J. Wood, “Development of a 3.2 g untethered flapping-wing platform for flight energetics and control experiments,” 2016 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3227-3233, 2016. https://doi.org/10.1109/ICRA.2016.7487492
- [19] J. Mou, W. Zhang, C. Wu, and Q. Guo, “Adaptive control of flapping-wing micro aerial vehicle with coupled dynamics and unknown model parameters,” Applied Sciences, Vol.12, No.18, Article No.9104, 2022. https://doi.org/10.3390/app12189104
- [20] Y. Ozawa, T. Fujikawa, and K. Kikuchi, “Analysis of turning motion for developing a butterfly-style flapping robot,” MM Science J., pp. 2198-2204, 2018. https://doi.org/10.17973/MMSJ.2018_03_201765
- [21] C. Rossi, J. Colorado, W. Coral, and A. Barrientos, “Bending continuous structures with smas: A novel robotic fish design,” Bioinspiration & Biomimetics, Vol.6, No.4, Article No.045005, 2011. https://doi.org/10.1088/1748-3182/6/4/045005
- [22] A. E. Gomez-Tamm, V. Perez-Sanchez, B. C. Arrue, and A. Ollero, “Sma actuated low-weight bio-inspired claws for grasping and perching using flapping wing aerial systems,” 2020 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 8807-8814, 2020. https://doi.org/10.1109/IROS45743.2020.9341741
- [23] T. Fujikawa, Y. Sato, T. Yamashita, and K. Kikuchi, “Development of a lead-lag mechanism using simple flexible links for a small butterfly-style flapping robot,” 2010 World Automation Congress, 2010.
- [24] A. Hosoi, S. Sato, Y. Ozawa, K. Kikuchi, and T. Fujikawa, “A study on glide characteristics of a small flapping robot,” J. of Japan Society for Design Engineering, Vol.54, No.4, pp. 265-274, 2019. https://doi.org/10.14953/jjsde.2018.2796
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.