Paper:
Vision/INS/Altimeter-Based Navigation and Control for Autonomous Drones in Indoor Environments
Satoshi Suzuki

Chiba University
1-33 Yayoi-cho, Inage-ku, Chiba, Chiba 263-8522, Japan

In this study, we aim to develop a navigation and control system that enables drones to fly autonomously with high accuracy in indoor environments, including narrow aisles. First, we propose an EKF-based vision-aided inertial navigation system with altimeter (VINS-ALT), which combines monocular-SLAM results with data from the IMU and altimeter. In addition, a detection and correction system is designed to reduce altimeter errors caused by changes in ground surface characteristics, such as steps and slopes. Furthermore, a flight control system that achieves both trajectory tracking performance and robustness is developed. Finally, the effectiveness of the entire system is validated through autonomous flight control experiments in an indoor environment.
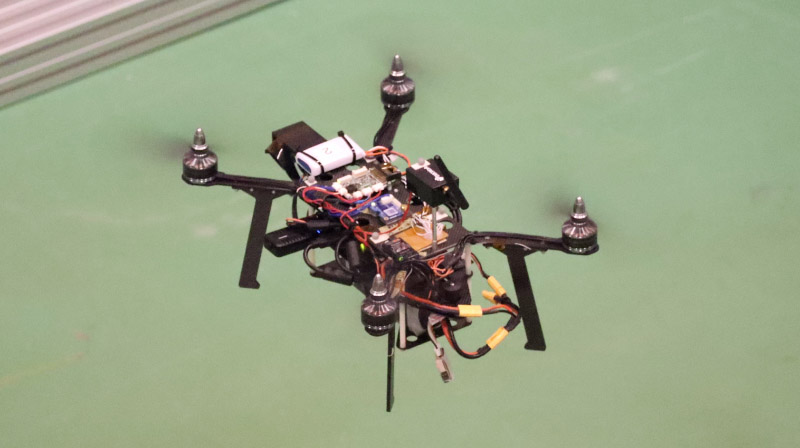
Indoor autonomous flying drone
- [1] A. M. Atieh, H. Kaylani, Y. Al-abdallat, A. Qaderi, L. Ghoul, L. Jaradat, and I. Hdairis, “Performance Improvement of Inventory Management System Processes by an Automated Warehouse Management System,” Procedia CIRP, Vol.41, pp. 568-572, 2016. https://doi.org/10.1016/j.procir.2015.12.122
- [2] J. Tiemann and C. Wietfeld, “Scalable and Precise Multi-UAV Indoor Navigation Using TDOA-based UWB Localization,” 2017 Int. Conf. on Indoor Positioning and Indoor Navigation, 2017. https://doi.org/10.1109/IPIN.2017.8115937
- [3] J. Tiemann, F. Schweikowski, and C. Wietfeld, “Design of an UWB Indoor-Positioning System for UAV Navigation in GNSS-Denied Environments,” 2015 Int. Conf. on Indoor Positioning and Indoor Navigation, 2015. https://doi.org/10.1109/IPIN.2015.7346960
- [4] J. Song, Z. Liu, X. Liu, and J. Guo, “Tightly Coupled Visual Inertial Odometry based on Artificial Landmarks,” 2018 IEEE Int. Conf. on Information and Automation, 2018. https://doi.org/10.1109/ICInfA.2018.8812447
- [5] X. Zhang, Y. Du, F. Chen, L. Qin, and Q. Ling, “Indoor Position Control of a Quadrotor UAV with Monocular Vision Feedback,” 37th Chinese Control Conf., 2018. https://doi.org/10.23919/ChiCC.2018.8483542
- [6] J. Yang, Y. Li, L. Cao, Y. Jiang, L. Sun, and Q. Xie, “A Survey of SLAM Research based on LiDAR Sensors,” Int. J. Sens., Vol.1, No.1, Article No.1003, 2019.
- [7] S. Hara, T. Shimizu, M. Konishi, R. Yamamura, and S. Ikemoto, “Autonomous Mobile Robot for Outdoor Slope Using 2D LiDAR with Uniaxial Gimbal Mechanism,” J. Robot. Mechatron., Vol.32, No.6, pp. 1173-1182, 2020. https://doi.org/10.20965/jrm.2020.p1173
- [8] M. Inagawa, K. Yoshizawa, T. Kawabe, and T. Takei, “Automatic Calibration of Environmentally Installed 3D-LiDAR Group Used for Localization of Construction Vehicles,” J. Robot. Mechatron., Vol.36, No.2, pp. 320-333, 2024. https://doi.org/10.20965/jrm.2024.p0320
- [9] T. Taketomi, H. Uchiyama, and S. Ikeda, “Visual-SLAM algorithms: A survey from 2010 to 2016,” IPSJ Trans. on Computer Vision and Applications, Vol.9, Article No.16, 2017. https://doi.org/10.1186/s41074-017-0027-2
- [10] L. Sun, R. P. Singh, and F. Kanehiro, “Visual SLAM Framework Based on Segmentation with the Improvement of Loop Closure Detection in Dynamic Environments,” J. Robot. Mechatron., Vol.33, No.6, pp. 1385-1397, 2021. https://doi.org/10.20965/jrm.2021.p1385
- [11] Z. Chai and T. Matsumaru, “ORB-SHOT SLAM: Trajectory Correction by 3D Loop Closing Based on Bag-of-Visual-Words (BoVW) Model for RGB-D Visual SLAM,” J. Robot. Mechatron., Vol.29, No.2, pp. 365-380, 2017. https://doi.org/10.20965/jrm.2017.p0365
- [12] T. Suzuki, Y. Amano, T. Hashizume, and S. Suzuki, “3D Terrain Reconstruction by Small Unmanned Aerial Vehicle Using SIFT-Based Monocular SLAM,” J. Robot. Mechatron., Vol.23, No.2, pp. 292-301, 2011. https://doi.org/10.20965/jrm.2011.p0292
- [13] S. Weiss and R. Siegwart, “Real-time metric state estimation for modular vision-inertial systems,” 2011 IEEE Int. Conf. on Robotics and Automation, pp. 4531-4537, 2011. https://doi.org/10.1109/ICRA.2011.5979982
- [14] T. Qin, P. Li, and S. Shen, “VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator,” IEEE Trans. on Robotics, Vol.34, No.4, pp. 1004-1020, 2018. https://doi.org/10.1109/TRO.2018.2853729
- [15] C. Campos, R. Elvira, J. J. G. Rodríguez, J. M. M. Montiel, and J. D. Tardós, “ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual–Inertial, and Multimap SLAM,” IEEE Trans. on Robotics, Vol.37, No.6, pp. 1874-1890, 2021. https://doi.org/10.1109/TRO.2021.3075644
- [16] K. Fodor and R. Viktor, “Validation of ORB-SLAM3 and VINS-Mono with Low-Cost Sensor Setup in Outdoor Environment,” 2023 IEEE 21st World Symposium on Applied Machine Intelligence and Informatics (SAMI), pp. 000027-000032, 2023. https://doi.org/10.1109/SAMI58000.2023.10044540
- [17] A. M. Barros, M. Michel, Y. Moline, G. Corre, and F. Carrel, “A Comprehensive Survey of Visual SLAM Algorithms,” Robotics, Vol.11, No.1, Article No.24 2022. https://doi.org/10.3390/robotics11010024
- [18] E. Rublee, V. Rabaud, K. Konolige, and G. Bradski, “ORB: An efficient alternative to SIFT or SURF,” 2011 Int. on Computer Vision, 2011. https://doi.org/10.1109/ICCV.2011.6126544
- [19] Q. Li, R. Li, K. Ji, and W. Dai, “Kalman Filter and Its Application,” 2015 8th Int. Conf. on Intelligent Networks and Intelligent Systems (ICINIS), pp. 74-77, 2015. https://doi.org/10.1109/ICINIS.2015.35
- [20] S. Hochreiter and J. Schmidhuber, “Long Short-Term Memory,” Neural Comput., Vol.9, No.8, pp. 1735-1780, 1997. https://doi.org/10.1162/neco.1997.9.8.1735
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.