Review:
Community Service Robotics: Expansion of Robot Services Through Robot Collaboration Networks
Nobuto Matsuhira*,**

*The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan
**Shibaura Institute of Technology
3-7-5 Toyosu, Koto-ku, Tokyo 135-8548, Japan

The challenges facing society such as a declining birth rate and aging population, disaster response, labor shortages, and infection control are becoming increasingly complex. To address these diverse challenges, it is conceivable that robots with various functions could be networked to provide solutions. By integrating not only multifunctional robots, but also single-function robots, environmental sensors, and IoT devices into a system, a wider range of issues can be addressed. Social issues differ across regions, and a variety of applications can be developed by addressing these issues. Furthermore, if such a system is implemented into society, it could lead to the creation of new markets and contribute to social revitalization. Here, such an application of robotics is referred to as “community service robotics.” In fact, research on robotic collaboration and the development of platforms for this purpose are already underway. This article introduces trends in robotic collaboration networks and our efforts to tackle these societal challenges.
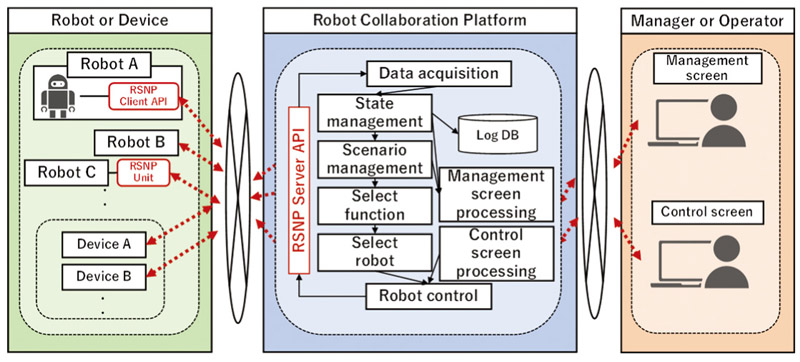
System architecture for heterogeneous robots
- [1] “Special Issue: Diversified service robots,” Robot (J. of Japan Robot Association), No.279, pp. 2-48, 2024 (in Japanese).
- [2] C. S. Chen, C. J. Lin, and C. C. Lai, “Non-contact service robot development in fast-food restaurants,” IEEE Access, Vol.10, pp. 31466-31479, 2022. https://doi.org/10.1109/ACCESS.2022.3155661
- [3] T. Shimmura, R. Ichikari, T. Okuma, and S. Oura, “Catering robot introduction to an restaurant service to improve labor productivity,” J. Jpn. Ind. Manage. Assoc., Vol.74, No.4, pp. 167-176, 2024 (in Japanese). https://doi.org/10.11221/jima.74.167
- [4] K. Takeuchi, Y. Yamazaki, and K. Yoshifuji, “Avatar work: Telework for disabled people unable to go outside by using avatar robots,” The 15th annual ACM/IEEE Int. Conf. on Human-Robot Interaction (HRI2020), pp. 53-60, 2020. https://doi.org/10.1145/3371382.3380737
- [5] N. Matsuhira, M. Shimoyama, T. Ikeda, T. Nakai, M. Narita, and T. Yamaguchi, “Concept of community service robot network coping with various social problems,” 2017 IEEE/SICE Int. Symp. on System Integration (SII), pp. 1004-1009, 2017. https://doi.org/10.1109/SII.2017.8279354
- [6] T. Akimoto and N. Hagita, “Introduction to a network robot system,” 2006 Int. Symp. on Intelligent Signal Processing and Communications, pp. 91-94, 2006. https://doi.org/10.1109/ISPACS.2006.364842
- [7] K. Kamei, F. Zanlungo, T. Kanda, Y. Horikawa, T. Miyashita, and N. Hagita, “Cloud networked robotics for social robotic services extending robotic functional service standards to support autonomous mobility system in social environments,” 2017 14th Int. Conf. on Ubiquitous Robots and Ambient Intelligence (URAI), pp. 897-902, 2017. https://doi.org/10.1109/URAI.2017.7992862
- [8] K. Tanie and N. Matsuhira, “Common platform technology for next-generation robots – Development of platforms based on information structured environment –,” J. of the Robotics Society of Japan, Vol.25, No.4, pp. 501-504, 2007 (in Japanese). https://doi.org/10.7210/jrsj.25.501
- [9] Y.-G. Ha, J.-C. Sohn, and Y.-J. Cho, “Service-oriented integration of networked robots with ubiquitous sensors and devices using the semantic Web services technology,” 2005 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3947-3952, 2005. https://doi.org/10.1109/IROS.2005.1545016
- [10] J. Sakamoto, K. Kiyoyama, K. Matsumoto, Y. Pyo, A. Kawamura, and R. Kurazume, “Development of ROS-TMS 5.0 for informationally structured environment,” ROBOMECH J., Vol.5, No.1, Article No.24, 2018. https://doi.org/10.1186/s40648-018-0123-9
- [11] S. Sugano and Y. Shirai, “Robot design and environment design – Waseda robot-house project,” 2006 SICE-ICASE Int. Joint Conf., pp. I-31-I-34, 2006. https://doi.org/10.1109/SICE.2006.314981
- [12] D. Brscic, T. Sasaki, and H. Hashimoto, “Acting in intelligent space – Mobile robot control based on sensors distributed in space –,” 2007 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics, 2007. https://doi.org/10.1109/AIM.2007.4412496
- [13] Y. Nakamura, S. Muto, Y. Maeda, M. Mizukawa, M. Motegi, and Y. Takashima, “Proposal of framework based on 4W1H and properties of robots and objects for development of physical service system,” J. Robot. Mechatron., Vol.26, No.6, pp. 758-771, 2014. https://doi.org/10.20965/jrm.2014.p0758
- [14] H. Inoue and H. Hirukawa, “Special Issue on Robot Project for EXPO 2005,” J. of the Robotics Society of Japan, Vol.24, No.2, p. 147, 2006 (in Japanese).
- [15] S. Jeon, M. Jang, D. Lee, C.-E. Lee, and Y.-J. Cho, “Control architecture for heterogeneous multiple robots with human-in-the-loop,” 2012 9th Int. Conf. on Ubiquitous Robots and Ambient Intelligence (URAI), pp. 274-278, 2012. https://doi.org/10.1109/URAI.2012.6462993
- [16] D. Marcheras, M. Ayaida, N. Messai, and F. Valentin, “A new middleware for managing heterogeneous robot in ubiquitous environments,” 2020 8th Int. Conf. on Wireless Networks and Mobile Communications (WINCOM), 2020. https://doi.org/10.1109/WINCOM50532.2020.9272477
- [17] J. Liu, F. Zhou, L. Yin, and Y. Wang, “A novel cloud platform for service robots,” IEEE Access, Vol.7, pp. 182951-182961, 2019. https://doi.org/10.1109/ACCESS.2019.2927743
- [18] L. Korosi, F. Duchon, and P. Lukac, “Open platform for innovation in logistics-agent optimization,” 2022 Cybernetics & Informatics (K&I), 2022. https://doi.org/10.1109/KI55792.2022.9925951
- [19] N. Matsui, I. Jayarathne, H. Kageyama, K. Naruse, K. Urabe, R. Sakamoto, T. Mashiko, S. Kumada, Y. Yaguchi, M. Yashiro, Y. Ishibashi, and M. Yutani, “Local and global path planning for autonomous mobile robots using hierarchized maps,” J. Robot. Mechatron., Vol.34, No.1, pp. 86-100, 2022. https://doi.org/10.20965/jrm.2022.p0086
- [20] T. Kaneko, I. Asada, K. Kato, Y. Seshime, N. Matsuhira, and K. Suzuki, “Navigation using Node-RED and robot middleware,” Robomech2020, Article No.2P1-G06, 2020 (in Japanese). https://doi.org/10.1299/jsmermd.2020.2P1-G06
- [21] M. Narita, Y. Murakawa, M. Ueki, H. Nakamoto, R. Hiura, S. Hirano, H. Kurata, and Y. Kato, “Development of a RSNP (robot service network protocol) 2.0 targeting a robot service platform in diffusion period,” J. of the Robotics Society of Japan, Vol.27, No.8, pp. 33-43, 2009 (in Japanese). https://doi.org/10.7210/jrsj.27.857
- [22] Y. Kato, T. Izui, Y. Murakawa, K. Okabayashi, M. Ueki, and Y. Tsuchiya, “Research and development environments for robot services and its implementation,” 2011 IEEE/SICE Int. Symp. on System Integration (SII), pp. 306-311, 2011. https://doi.org/10.1109/SII.2011.6147465
- [23] Y. Kato, T. Izui, Y. Tsuchiya, M. Narita, M. Ueki, Y. Murakawa, and K. Okabayashi, “RSi-cloud for integrating robot services with internet services,” 37th Annual Conf. on IEEE Industrial Electronics Society (IECON 2011), pp. 2158-2163, 2011.
- [24] M. Narita, S. Okabe, Y. Kato, Y. Murakwa, K. Okabayashi, and S. Kanda, “Reliable cloud-based robot services,” 39th Annual Conf. of the IEEE Industrial Electronics Society (IECON 2013), pp. 8317-8322, 2013. https://doi.org/10.1109/IECON.2013.6700526
- [25] Robot Service Initiative, “Robot Service Network Protocol 2 Specification,” 2010.
- [26] N. Matsuhira, T. Sasaki, and H. Asama, “Development of a seamless tele-robot system combining teleoperation and autonomous navigation using a common communication protocol RSNP,” SII2024, pp. 129-134, 2024. https://doi.org/10.1109/SII58957.2024.10417462
- [27] K. Kato, N. Matsuhira, T. Sasaki, and H. Asama, “Proposal and demonstration of robot collaboration architecture using RSNP,” 2023 IEEE/SICE Int. Symp. on System Integration (SII), 2023. https://doi.org/10.1109/SII55687.2023.10039358
- [28] N. Matsuhira, M. Sandison, M. Sung, K. Groves, S. Watson, S.-C. Yu, T. Sasaki, S. Nakashima, A. Yamashita, and H. Asama, “Development of a remotely operated robot system for movement in narrow areas based on workspace characteristics,” 2025 IEEE/SICE Int. Symp. on System Integration (SII), pp. 1102-1106, 2025. https://doi.org/10.1109/SII59315.2025.10870888
- [29] S. Nakagawa, H. Akutsu, Y. Tsuchiya, N. Matsuhira, and M. Narita, “Demonstration Experiments of a Robot Service of Stamp-Rally and Questionnaires for Tourism Destination Marketing,” 2016 5th IIAI Int. Congress on Advanced Applied Informatics (IIAI-AAI), pp. 914-919, 2016. https://doi.org/10.1109/IIAI-AAI.2016.214
- [30] S. Okano, K. Kato, Y. Nakamura, N. Matsuhira, and M. Narita, “Development and Demonstration of a General-purpose Communication Unit for a Robot Cooperation Network,” J. of the Robotics Society of Japan, Vol.39, No.10, pp. 973-980, 2021 (in Japanese). https://doi.org/10.7210/jrsj.39.973
- [31] K. Kato, Y. Nakamura, N. Matsuhira, and M. Narita, “Remote control experiment of multiple robots using RSNP unit,” 2021 21st Int. Conf. on Control, Automation and Systems (ICCAS), pp. 1866-1871, 2021. https://doi.org/10.23919/ICCAS52745.2021.9649817
- [32] S. Kakudate, N. Takeda, M. Nakahira, Y. Matsumoto, K. Shibamuma, and A. Tesini, “Progress of R&D and design of blanket remote handling equipment for ITER,” Fusion Engineering and Design, Vol.83, Nos.10-12, pp. 1850-1855, 2008. https://doi.org/10.1016/j.fusengdes.2008.08.029
- [33] H. Asama, “Remote-controlled technology and robot technology for accident response and decommissioning of Fukushima nuclear power plant,” J. of the Atomic Energy Society of Japan, Vol.56, No.5, pp. 313-317, 2014.
- [34] S. Okano, N. Matsuhira, E. Shimokawara, T. Yamaguchi, and M. Narita, “Employing Robots in a Museum Environment: Design and Implementation of Collaborative Robot Network,” 2019 16th Int. Conf. on Ubiquitous Robots (UR), pp. 224-227, 2019. https://doi.org/10.1109/URAI.2019.8768787
- [35] N. Matsuhira and M. Narita, “Development of robot network collaboration experiments using common specifications,” SI2021, Article No.1E4-01, 2021 (in Japanese).
- [36] N. Tajima, N. Kusaka, S. Okano, N. Matsuhira, and T. Hashimoto, “Study of network cooperation system between three different types of robots,” ROBOMEC, Article No.2P1-G04, 2020 (in Japanese). https://doi.org/10.1299/jsmermd.2020.2P1-G04
- [37] R. Aoki, N. Matsuhira, S. Suzuki, H. Asama, and S. Miwa, “Collaborative Operation of External Sensors and Mobile Robots Using RSNP,” SICE SI2023, Article No.3H1-03, 2023 (in Japanese).
- [38] N. Senke, K. Abe, T. Mizuya, T. Nagao, K. Kato, and N. Matsuhira, “An implementation of a remote monitoring system for NC machine tools using local 5G and RSNP: Focusing on small and medium-sized factories,” 2022 Annual Conf. on Electronics, Information and Systems, IEEJ, pp. 695-700, 2022 (in Japanese).
- [39] K. Ota, “Remote control and coordination of multiple mobile robots using a cloud environment,” RSJ2024, Article No.2E2-06, 2024 (in Japanese).
- [40] T. Ikeda, M. Shimoyama, and N. Matsuhira, “Questionnaire experiment using networked service robots,” 2017 18th Int. Conf. on Advanced Robotics (ICAR), pp. 422-425, 2017. https://doi.org/10.1109/ICAR.2017.8023643
- [41] S. Miki, T. Nishioka, and N. Matsuhira, “Seamless positioning system using GPS and beacons for community service robot,” 2021 IEEE/SICE Int. Symp. on System Integration (SII), pp. 646-649, 2021. https://doi.org/10.1109/IEEECONF49454.2021.9382671
- [42] R. Shinden, N. Otsuka, K. Kato, N. Tajima, N. Matsuhira, and T. Hashimoto, “Development and basic experiment of a humanoid robot system for remote physical exercise,” SEATUC J. of Science and Engineering, Vol.2, Issue 1, pp. 34-39, 2021. https://doi.org/10.34436/sjse.2.1_34
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.