Paper:
Impact of Negotiating the Number of Solved Problems by a Robot on Junior High School Students in Collaborative Learning
Hiroki Kaede*
 , Felix Jimenez**
, and Tomoki Miyamoto***
, Felix Jimenez**
, and Tomoki Miyamoto***
*Graduate School of Information Science and Technology, Aichi Prefectural University
1522-3 Ibaragabasama, Nagakute, Aichi 480-1198, Japan
**School of Information Science and Technology, Aichi Prefectural University
1522-3 Ibaragabasama, Nagakute, Aichi 480-1198, Japan
***Graduate School of Informatics and Engineering, The University of Electro-Communications
5-1 Cyofugaokan, Chofu, Tokyo 182-8585, Japan

In recent years, educational-support robots that assist learners in learning have attracted much attention. We focus on learning situations with robots where learners learn by solving problems. Conventionally, robots have a predefined number of problems for a learner to solve (hereinafter referred to as “the number of solved problems”), making it difficult for the robot to respond to the desire of the learner to learn. This makes it difficult to realize long-term collaborative learning with robots; thus, it is important to create a learning environment in which learners can learn spontaneously and are motivated to learn. We propose a “problem-number negotiation method,” in which the learner decides the number of solved problems while conversing with the robot before the start of learning. For the robot to achieve an appropriate conversational tone in this method, a conversational tone based on politeness theory was adopted. The proposed method was compared with that of a conventional robot to determine whether the proposed method increases the number of solved problems. Results showed that junior high school students spontaneously solved more problems with the robot equipped with the proposed method than with the conventional robot during short-term learning.
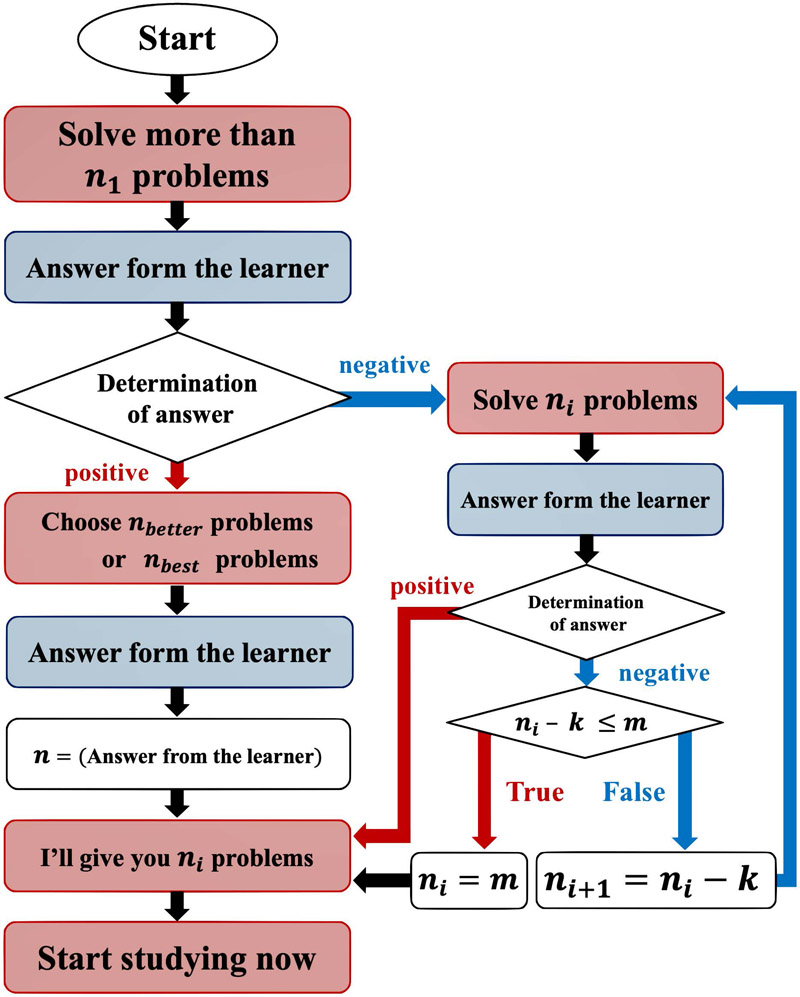
Problem-number negotiation method
- [1] F. Jimenez et al., “Research Trends on Educational-Support robots,” J. of Japan Society for Fuzzy Theory and Intelligent Informatics, Vol.26, No.1, pp. 2-8, 2014 (in Japanese). https://doi.org/10.3156/jsoft.26.1_2
- [2] F. Jimenez et al., “Feasibility of Collaborative Learning with Robots which Prompts Constructive Interaction,” Trans. of the Japanese Society for Artificial Intelligence, Vol.31, No.3, Article No.A-F93_1-10, 2016 (in Japanese). https://doi.org/10.1527/tjsai.A-F93
- [3] N. Miyake and H. Ishiguro, “Toward a Collaboratively Creative Society through Human-Robot Symbiosis,” J. of the Robotics Society of Japan, Vol.29, No.10, pp. 868-870, 2011 (in Japanese). https://doi.org/10.7210/jrsj.29.868
- [4] T. Kanda et al., “Interactive robots as social partners and peer tutors for children: A field trial,” Hum-Comout, Interact, Vol.19, Issues 1-2, pp. 61-84, 2004. https://doi.org/10.1080/07370024.2004.9667340
- [5] O. H. Kwon et al., “Telepresence robot system for English tutoring,” IEEE Workshop on Advanced Robotics and its Social Impacts, pp.152-155, 2010. http://dx.doi.org/10.1109/ARSO.2010.5679999
- [6] J. Han et al., “Comparative study on the educational use of home robots for children,” J. of Information Processing Systems, Vol.4, No.4, pp.159-168, 2008. http://dx.doi.org/10.3745/JIPS.2008.4.4.159
- [7] Koizumi et al., “Collaborative Learning Experiment with Social Robot,” J. of the Robotics Society of Japan, Vol.29, No.10, pp. 902-906, 2011 (in Japanese). https://doi.org/10.7210/jrsj.29.902
- [8] T. Kanda et al., “Participation of Interactive Humanoid Robots in Human Society—Application to Foreign Language Education—,” J. of the Robotics Society of Japan, Vol.22, No.5, pp. 636-647, 2004. https://doi.org/10.7210/jrsj.22.636
- [9] F. Jimenez et al., “Psychological Effect in Collaborative Learning with Robot Using Emotion Expression Model,” J. of Japan Society for Fuzzy Theory and Intelligent Informatics, Vol.27, No.6, pp. 835-844, 2015 (in Japanese). https://doi.org/10.3156/jsoft.27.835
- [10] F. Jimenez et al., “Effect of a Novel Sympathy-Expression Method on Collaborative Learning Among Junior High School Students and Robots,” J. Robot. Mechatron, Vol.30, No.2, pp. 282-291, 2018. https://doi.org/10.20965/jrm.2018.p0282
- [11] K. Okawa et al., “Proposal of Learning Support Model for Teacher-Type Robot Supporting Learning According to Learner’s Perplexed Facial Expressions, Advances in Science,” J. Robot. Mechatron, Vol.36, No.1, pp. 168-180, 2024. https://doi.org/10.20965/jrm.2024.p0168
- [12] R. Yoshizawa et al., “Proposal of a Behavioral Model for Robots Supporting Learning According to Learners’ Learning Performance,” J. Robot. Mechatron, Vol.32, No.4, pp. 769-779, 2020. https://doi.org/10.20965/jrm.2020.p0769
- [13] H. Kaede et al., “Impression Effect of Educational-Support-Robot that Suggest the Number of Problems Using Politeness Theory,” J. of Japan Society for Fuzzy Theory and Intelligent Informatics, Vol.36, No.4, pp. 677-686, 2024 (in Japanese). https://doi.org/10.3156/jsoft.36.4_677
- [14] P. Brown and S. C. Levinson, “Politeness: Some universals in language usage,” Cambridge University Press, 1987.
- [15] E. Goffman, “Interaction Ritual: Essays on Face Behavior,” Pantheon Books, 1967.
- [16] T. Miyamoto et al., “The Effect of Differences in Linguistic Behavior by Conversational Agent Based on Politeness Strategies for Development Relationship with Humans—Psychological Effects of Joke at the First Meeting—,” J. of Japan Society for Fuzzy Theory and Intelligent Informatics, Vol.30, No.5, pp. 753-765, 2018 (in Japanese). https://doi.org/10.3156/jsoft.30.5_753
- [17] S. Kurachi, “How to encourage spontaneous learning,” Child Study, Vol.25, No.8, pp. 38-45, 1971 (in Japanese).
- [18] S. Shigeno, “Recognition of vocal expression of emotion and its acoustic attributes,” The Japanese J. of Psychology, Vol.74, No.6, pp. 540-546, 2004 (in Japanese). https://doi.org/10.4992/jjpsy.74.540
- [19] C. Bartneck et al., “Measurement Instruments for the Anthropomorphism, Animacy, Likability, Perceived, Intelligence, and Perceived Safety of Robots,” Int. J. of Social Robotics, Vol.1, pp. 71-81, 2009. https://doi.org/10.1007/s12369-008-0001-3
- [20] R. Nomura, “Human’s Subjective Evaluation in Human-Agent Interaction (HAI),” Trans. of the Japanese Society for Artificial Intelligence, Vol.31, No.2, pp. 224-229, 2016 (in Japanese). https://doi.org/10.11517/jjsai.31.2_224
- [21] B. J. Fogg, “Presuasive Technology: Using Computers to Change what We Think and Do,” Morgan Kaufmann, San Mateo, 2003.
- [22] T. Furuhashi et al., “Statistics, Multivariate Analysis and Soft Computing toward Analysis of Systems with Ultra Many Degrees of Freedom,” Kyoritsu Shuppan Co., Ltd., 2012 (in Japanese).
- [23] T. Sakurai and S. Takano, “A new self-report scale of intrinsic versus extrinsic motivation toward learning in children,” Tsukuba Psychological Research, Vol.7, pp. 43-54, 1985 (in Japanese).
- [24] A. Mizumoto and O. Takeuchi, “Basic and Considerations for Reporting Effect Sizes in Research Papers,” Bulletin of the Kansai Society of English Language Education “English Education Research,” Vol.31, pp. 57-66, 2008 (in Japanese).
- [25] S. Shiba and T. Haebara, “Statistical Analysis Methods in Behavioral Sciences,” University of Tokyo Press, 1990 (in Japanese).
- [26] H. Ishiguro, “Android Science Robotics research for human understanding,” Mainichi Communications Inc., 2007 (in Japanese).
- [27] M. Shiomi et al., “Interactive humanoid robots for a science museum,” IEEE Intelligent Systems, Vol.22, No.2, pp. 25-32, 2007. https://doi.org/10.1109/MIS.2007.37
- [28] K. Hayashi et al., “Humanoid robots as a passive-social medium—A field experiment at a train station—,” Int. Conf. on Human Robot Interaction (HRI2007), pp. 137-144, 2007. https://doi.org/10.1145/1228716.1228735
- [29] T. Kanda, “How a Communication Robot Can Contribute to Education?,” Trans. of the Japanese Society for Artificial Intelligence, Vol.23, No.2, pp. 229-236, 2008. https://doi.org/10.11517/jjsai.23.2_229
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.