Paper:
Proposal of UAV-SLAM-Based 3D Point Cloud Map Generation Method for Orchards Measurements
Soki Nishiwaki, Haruki Kondo, Shuhei Yoshida, and Takanori Emaru
Faculty and Graduate School of Engineering, Hokkaido University
Kita 13 Nishi 8, Kita-ku, Sapporo, Hokkaido 060-8628, Japan

This paper proposes a method for generating highly accurate point cloud maps of orchards using an unmanned aerial vehicle (UAV) equipped with light detection and ranging (LiDAR). The point cloud captured by the UAV-LiDAR was converted to a geographic coordinate system using a global navigation satellite system / inertial measurement unit (GNSS/IMU). The converted point cloud is then aligned with the simultaneous localization and mapping (SLAM) technique. As a result, a 3D model of an orchard is generated in a low-cost and easy-to-use manner for pesticide application with precision. The method of direct point cloud alignment with real-time kinematic-global navigation satellite system (RTK-GNSS) had a root mean square error (RMSE) of 42 cm between the predicted and true crop height values, primarily due to the effects of GNSS multipath and vibration of automated vehicles. Contrastingly, our method demonstrated better results, with RMSE of 5.43 cm and 2.14 cm in the vertical and horizontal axes, respectively. The proposed method for predicting crop location successfully achieved the required accuracy of less than 1 m with errors not exceeding 30 cm in the geographic coordinate system.
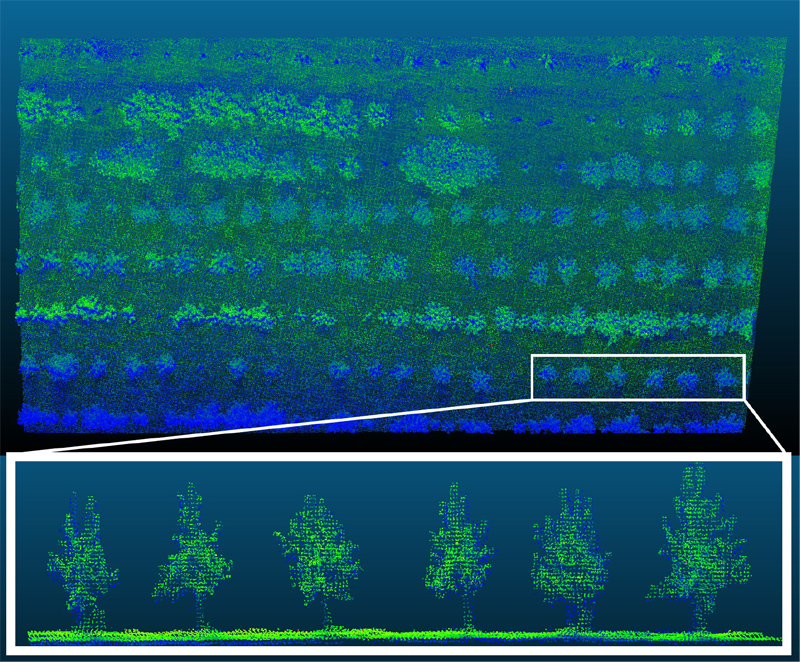
Orchard point cloud map by UAV-SLAM
- [1] N. De Cock, M. Massinon, S. O. T. Salah, and F. Lebeau, “Investigation on optimal spray properties for ground based agricultural applications using deposition and retention models,” Biosystems Engineering, Vol.162, pp. 99-111, 2017. https://doi.org/10.1016/j.biosystemseng.2017.08.001
- [2] C. Gentil-Sergent et al., “Quantifying pesticide emission fractions for tropical conditions,” Chemosphere, Vol.275, Article No.130014, 2021. https://doi.org/10.1016/j.chemosphere.2021.130014
- [3] S. Otto, D. Loddo, C. Baldoin, and G. Zanin, “Spray drift reduction techniques for vineyards in fragmented landscapes,” J. of Environmental Management, Vol.162, pp. 290-298, 2015. https://doi.org/10.1016/j.jenvman.2015.07.060
- [4] B. S. Faiçal et al., “An adaptive approach for UAV-based pesticide spraying in dynamic environments,” Computers and Electronics in Agriculture, Vol.138, pp. 210-223, 2017. https://doi.org/10.1016/j.compag.2017.04.011
- [5] R. Salcedo et al., “Reducing ground and airborne drift losses in young apple orchards with PWM-controlled spray systems,” Computers and Electronics in Agriculture, Vol.189, Article No.106389, 2021. https://doi.org/10.1016/j.compag.2021.106389
- [6] M. Hu and M. Whitty, “An evaluation of an apple canopy density mapping system for a variable-rate sprayer,” IFAC-PapersOnLine, Vol.52, No.30, pp. 342-348, 2019. https://doi.org/10.1016/j.ifacol.2019.12.563
- [7] R. Sekine, T. Tomizawa, and S. Tarao, “Trial of utilization of an environmental map generated by a high-precision 3D scanner for a mobile robot,” J. Robot. Mechatron., Vol.35, No.6, pp. 1469-1479, 2023. https://doi.org/10.20965/jrm.2023.p1469
- [8] J. Zhang and S. Singh, “LOAM: Lidar odometry and mapping in real-time,” Proc. of Robotics: Science and Systems X, Robotics: Science and Systems Conference (RSS), 2014. https://doi.org/10.15607/RSS.2014.X.007
- [9] T. Shan et al., “LIO-SAM: Tightly-coupled lidar inertial odometry via smoothing and mapping,” 2020 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 5135-5142, 2020. https://doi.org/10.1109/IROS45743.2020.9341176
- [10] K. Wang, L. Kooistra, R. Pan, W. Wang, and J. Valente, “UAV-based simultaneous localization and mapping in outdoor environments: A systematic scoping review,” J. of Field Robotics, Vol.41, No.5, pp. 1617-1642, 2024. https://doi.org/10.1002/rob.22325
- [11] L. Longchamps et al., “Yield sensing technologies for perennial and annual horticultural crops: A review,” Precision Agriculture, Vol.23, No.6, pp. 2407-2448, 2022. https://doi.org/10.1007/s11119-022-09906-2
- [12] M. Zude-Sasse, S. Fountas, T. A. Gemtos, and N. Abu-Khalaf, “Applications of precision agriculture in horticultural crops,” European J. of Horticultural Science, Vol.81, No.2, pp. 78-90, 2016. https://doi.org/10.17660/eJHS.2016/81.2.2
- [13] I. Del-Moral-Martínez et al., “Georeferenced scanning system to estimate the leaf wall area in tree crops,” Sensors, Vol.15, No.4, pp. 8382-8405, 2015. https://doi.org/10.3390/s150408382
- [14] L. Han, S. Wang, Z. Wang, L. Jin, and X. He, “Method of 3D voxel prescription map construction in digital orchard management based on LiDAR-RTK boarded on a UGV,” Drones, Vol.7, No.4, Article No.242, 2023. https://doi.org/10.3390/drones7040242
- [15] L. Liu, Y. Liu, X. He, and W. Liu, “Precision variable-rate spraying robot by using single 3D LiDAR in orchards,” Agronomy, Vol.12, No.10, Article No.2509, 2022. https://doi.org/10.3390/agronomy12102509
- [16] M. Pini, G. Marucco, G. Falco, M. Nicola, and W. De Wilde, “Experimental testbed and methodology for the assessment of RTK GNSS receivers used in precision agriculture,” IEEE Access, Vol.8, pp. 14690-14703, 2020. https://doi.org/10.1109/ACCESS.2020.2965741
- [17] W. H. Maes and K. Steppe, “Perspectives for remote sensing with unmanned aerial vehicles in precision agriculture,” Trends in Plant Science, Vol.24, No.2, pp. 152-164, 2019. https://doi.org/10.1016/j.tplants.2018.11.007
- [18] M. Miwa and T. Ushiroda, “Precision flight drones with RTK-GNSS,” J. Robot. Mechatron., Vol.33, No.2, pp. 371-378, 2021. https://doi.org/10.20965/jrm.2021.p0371
- [19] U. G. Sefercik and M. Nazar, “Consistency analysis of RTK and non-RTK UAV DSMs in vegetated areas,” IEEE J. of Selected Topics in Applied Earth Observations and Remote Sensing, Vol.16, pp. 5759-5768, 2023. https://doi.org/10.1109/JSTARS.2023.3288947
- [20] D. Turner, A. Lucieer, and L. Wallace, “Direct georeferencing of ultrahigh-resolution UAV imagery,” IEEE Trans. on Geoscience and Remote Sensing, Vol.52, No.5, pp. 2738-2745, 2014. https://doi.org/10.1109/TGRS.2013.2265295
- [21] Y. Mu et al., “Characterization of peach tree crown by using high-resolution images from an unmanned aerial vehicle,” Horticulture Research, Vol.5, Article No.74, 2018. https://doi.org/10.1038/s41438-018-0097-z
- [22] X. Dong, Z. Zhang, R. Yu, Q. Tian, and X. Zhu, “Extraction of information about individual trees from high-spatial-resolution UAV-acquired images of an orchard,” Remote Sensing, Vol.12, No.1, Article No.133, 2020. https://doi.org/10.3390/rs12010133
- [23] M. Gerke and H.-J. Przybilla, “Accuracy analysis of photogrammetric UAV image blocks: Influence of onboard RTK-GNSS and cross flight patterns,” Photogrammetrie – Fernerkundung – Geoinformation, Vol.2016, No.1, pp. 17-30, 2016. https://doi.org/10.1127/pfg/2016/0284
- [24] T. Suzuki, D. Inoue, and Y. Amano, “Robust UAV position and attitude estimation using multiple GNSS receivers for laser-based 3D mapping,” 2019 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 4402-4408, 2019. https://doi.org/10.1109/IROS40897.2019.8967894
- [25] T. Suzuki, “3D mapping using Lidar and unmanned aerial vehicle,” J. of the Society of Instrument and Control Engineers, Vol.60, No.10, pp. 711-715, 2021 (in Japanese). https://doi.org/10.11499/sicejl.60.711
- [26] J. Akiyama, Y. Zong, N. Shinada, T. Suzuki, and Y. Amano, “High-resolution point cloud registration method for three-dimensional piping measurements,” J. Robot. Mechatron., Vol.35, No.6, pp. 1655-1662, 2023. https://doi.org/10.20965/jrm.2023.p1655
- [27] M. Nakagawa, “Role and technical issues of UAV-LiDAR with low-price 3D scanner,” J. of the Society of Instrument and Control Engineers, Vol.60, No.10, pp. 702-705, 2021 (in Japanese). https://doi.org/10.11499/sicejl.60.702
- [28] W. Yuan, D. Choi, and D. Bolkas, “GNSS-IMU-assisted colored ICP for UAV-LiDAR point cloud registration of peach trees,” Computers and Electronics in Agriculture, Vol.197, Article No.106966, 2022. https://doi.org/10.1016/j.compag.2022.106966
- [29] O. Bengtsson and A. Baerveldt, “Localization in changing environments – Estimation of a covariance matrix for the IDC algorithm,” 2001 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems: Expanding the Societal Role of Robotics in the Next Millennium, Vol.4, pp. 1931-1937, 2001. https://doi.org/10.1109/IROS.2001.976356
- [30] T. Tsubouchi, “Introduction to simultaneous localization and mapping,” J. Robot. Mechatron., Vol.31, No.3, pp. 367-374, 2019. https://doi.org/10.20965/jrm.2019.p0367
- [31] G. Grisetti, R. Kümmerle, C. Stachniss, and W. Burgard, “A tutorial on graph-based SLAM,” IEEE Intelligent Transportation Systems Magazine, Vol.2, No.4, pp. 31-43, 2010. https://doi.org/10.1109/MITS.2010.939925
- [32] A. Segal, D. Hähnel, and S. Thrun, “Generalized-ICP,” Robotics: Science and Systems V, 2009. https://doi.org/10.15607/RSS.2009.V.021
- [33] A. Myronenko and X. Song, “Point set registration: Coherent point drift,” IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol.32, No.12, pp. 2262-2275, 2010. https://doi.org/10.1109/tpami.2010.46
- [34] P. J. Besl and N. D. McKay, “A method for registration of 3-D shapes,” IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol.14, No.2, pp. 239-256, 1992. https://doi.org/10.1109/34.121791
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.