Paper:
Consensus Control of Multi-Agent System with Virtual Agents Considering Obstacle Avoidance
Hiroki Kimura and Atsushi Okuyama
Tokai University
4-1-1 Kitakaname, Hiratsuka, Kanagawa 259-1292, Japan

A multi-agent system (MAS) is a system whose overall behavior is determined by local interactions among multiple autonomous agents. Recently, research has been conducted on the application of MASs in real-world environments, in which the agents are assumed to be robots that drive on the ground, i.e., autonomous mobile robots, and acquire external environmental information using cameras. In such cases, the information that can be obtained by the agent is limited to the field of view (FOV) of the respective camera, and the overall graph structure is dynamic and time varying. In addition, because the FOV may be obstructed by obstacles during camera measurements, obstacle avoidance must be considered. In this study, we examined the MAS consensus problem considering the effects of a limited FOV obstructed by obstacles. Specifically, we propose a control method using virtual agents that considers obstacle avoidance based on funnel control. In addition, simulation study was performed to demonstrate the effectiveness of the proposed method for solving the MAS consensus problem in an environment with obstacles.
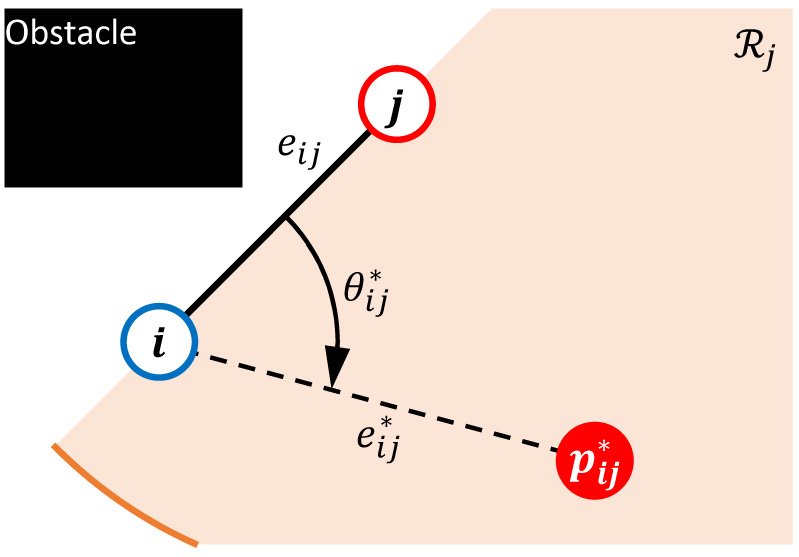
Obstacle avoidance by virtual agents
- [1] S. Azuma et al., “Control of Multi-Agent Systems,” Corona Publishing Co., Ltd., 2015 (in Japanese).
- [2] Y. Cao, W. Yu, W. Ren, and G. Chen, “An overview of recent progress in the study of distributed multi-agent coordination,” IEEE Trans. on Industrial Informatics, Vol.9, No.1, pp. 427-438, 2013. https://doi.org/10.1109/TII.2012.2219061
- [3] K. M. Hanga and Y. Kovalchuk, “Machine learning and multi-agent systems in oil and gas industry applications: A survey,” Computer Science Review, Vol.34, Article No.100191, 2019. https://doi.org/10.1016/j.cosrev.2019.08.002
- [4] M. Metzger and G. Polakow, “A survey on applications of agent technology in industrial process control,” IEEE Trans. on Industrial Informatics, Vol.7, No.4, pp. 570-581, 2011. https://doi.org/10.1109/TII.2011.2166781
- [5] J. Qin, Q. Ma, Y. Shi, and L. Wang, “Recent advances in consensus of multi-agent systems: A brief survey,” IEEE Trans. on Industrial Electronics, Vol.64, No.6, pp. 4972-4983, 2017. https://doi.org/10.1109/TIE.2016.2636810
- [6] S. Wang et al., “A data-driven multi-agent autonomous voltage control framework using deep reinforcement learning,” IEEE Trans. on Power Systems, Vol.35, No.6, pp. 4644-4654, 2020. https://doi.org/10.1109/TPWRS.2020.2990179
- [7] Q. Jin, G. Wu, K. Boriboonsomsin, and M. Barth, “Platoon-based multi-agent intersection management for connected vehicle,” 16th Int. IEEE Conf. on Intelligent Transportation Systems (ITSC 2013), pp. 1462-1467, 2013. https://doi.org/10.1109/ITSC.2013.6728436
- [8] A. Kamagaew, J. Stenzel, A. Nettsträter, and M. ten Hompel, “Concept of Cellular Transport Systems in facility logistics,” The 5th Int. Conf. on Automation, Robotics and Applications, pp. 40-45, 2011. https://doi.org/10.1109/ICARA.2011.6144853
- [9] E. L. Karfopoulos and N. D. Hatziargyriou, “A multi-agent system for controlled charging of a large population of electric vehicles,” IEEE Trans. on Power Systems, Vol.28, No.2, pp. 1196-1204, 2013. https://doi.org/10.1109/TPWRS.2012.2211624
- [10] T. Labeodan, K. Aduda, G. Boxem, and W. Zeiler, “On the application of multi-agent systems in buildings for improved building operations, performance and smart grid interaction – A survey,” Renewable and Sustainable Energy Reviews, Vol.50, pp. 1405-1414, 2015. https://doi.org/10.1016/j.rser.2015.05.081
- [11] J. G. Barajas-Ramírez and E. J. Ávila-Martínez, “Flocking motion of multi-agent systems: A proximity digraph case,” IFAC-PapersOnLine, Vol.56, No.2, pp. 10234-10239, 2023. https://doi.org/10.1016/j.ifacol.2023.10.904
- [12] M. Ji and M. Egerstedt, “Connectedness preserving distributed coordination control over dynamic graphs,” Proc. of the 2005 American Control Conf., Vol.1, pp. 93-98, 2005. https://doi.org/10.1109/ACC.2005.1469914
- [13] R. Olfati-Saber, “Flocking for multi-agent dynamic systems: Algorithms and theory,” IEEE Trans. on Automatic Control, Vol.51, No.3, pp. 401-420, 2006. https://doi.org/10.1109/TAC.2005.864190
- [14] N. S. Morozova, “Formation control and obstacle avoidance for multi-agent systems with dynamic topology,” 2015 Int. Conf. Stability and Control Processes in Memory of V. I. Zubov (SCP), pp. 580-583, 2015. https://doi.org/10.1109/SCP.2015.7342210
- [15] R. Toyota and T. Namerikawa, “Formation control of multi-agent system considering obstacle avoidance,” 2017 56th Annual Conf. of the Society of Instrument and Control Engineers of Japan (SICE), pp. 446-451, 2017. https://doi.org/10.23919/SICE.2017.8105616
- [16] Y. Xia, X. Na, Z. Sun, and J. Chen, “Formation control and collision avoidance for multi-agent systems based on position estimation,” ISA Trans., Vol.61, pp. 287-296, 2016. https://doi.org/10.1016/j.isatra.2015.12.010
- [17] S. Yang, T. Li, Q. Shi, W. Bai, and Y. Wu, “Artificial potential-based formation control with collision and obstacle avoidance for second-order multi-agent systems,” 2020 7th Int. Conf. on Information, Cybernetics, and Computational Social Systems (ICCSS), pp. 58-63, 2020. https://doi.org/10.1109/ICCSS52145.2020.9336836
- [18] H. Kimura and A. Okuyama, “Consensus problem based on funnel control considering obstacle avoidance,” The 10th IEEJ Int. Workshop on Sensing, Actuation, Motion, Control, and Optimization (SAMCON2024), 2024.
- [19] A. Ilchmann, E. P. Ryan, and P. Townsend, “Tracking control with prescribed transient behaviour for systems of known relative degree,” Systems & Control Letters, Vol.55, No.5, pp. 396-406, 2006. https://doi.org/10.1016/j.sysconle.2005.09.002
- [20] H. Shim and S. Trenn, “A preliminary result on synchronization of heterogeneous agents via funnel control,” 2015 54th IEEE Conf. on Decision and Control (CDC), pp. 2229-2234, 2015. https://doi.org/10.1109/CDC.2015.7402538
- [21] H. Kimura and A. Okuyama, “Funnel control in multi-agent systems with communication limitations,” 2018 IEEE 15th Int. Workshop on Advanced Motion Control (AMC), pp. 569-574, 2018. https://doi.org/10.1109/AMC.2019.8371156
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.