Paper:
Automatic Hand-Eye Calibration Method of Welding Robot Based on Linear Structured Light
Li Dongmin†, Wang Yu, Ma Wenping, Liu Xiujie, Ding Guowei, Zhang Guohui, and Fang Jiaqi
College of Intelligent Equipment, Shandong University of Science and Technology
No.223 Daizong Street, Tai’an, Shandong 271019, China
†Corresponding author

Aiming at solving the problems such as long calibration time, low precision, and complex operation in hand-eye calibration of welding robot, an automatic hand-eye calibration algorithm based on linear structured light was proposed to solve the calibration matrix X by using AX=ZB calibration equation. Firstly, a square calibration plate is customized to effectively constrain the structured light. The α-shape algorithm was adopted to extract the contour of the 3D point cloud model of the calibration plate. Secondly, an improved random sampling consistency algorithm which could determine the optimal iterative number was proposed to fit the contour point cloud, the contour point cloud model fitted was obtained. Finally, the 3D coordinates of the target points were determined with the linear structured light to complete the hand-eye calibration. In order to prevent the calibration plate from deviating from the acquisition range of the vision sensor during the calibration process, the distance between the linear structural light and the inner circle in the calibration plate was set to limit the motion range of the robot. In order to eliminate the error transfer of the robot body, an optimal solution of the rotation matrix R and the translation vector t of the calibration data was calculated with the singular value decomposition (SVD) and the least square rigid transpose method. The experimental results show that the calibration accuracy reaches 0.3 mm without compensating the robot body error, and the calibration speed is improved by 36% than the existing automatic calibration method. Therefore, the algorithm proposed can automatically complete the calibration only by establishing the user coordinates in advance, which improves the working accuracy and efficiency of the welding robots greatly.
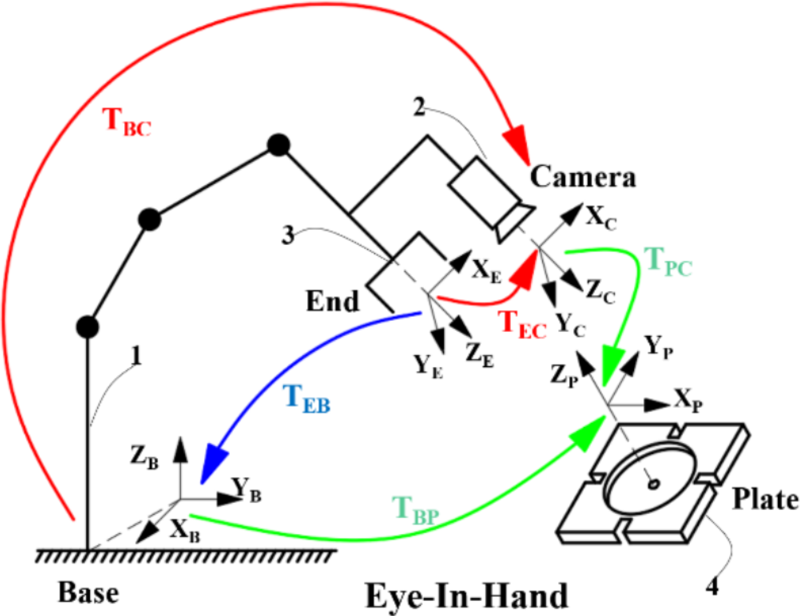
Hand-eye calibration model
- [1] J. Wang, X. Zhang, J. Liu, Y. Shi, and Y. Huang, “Line-Structured Light Fillet Weld Positioning Method to Overcome Weld Instability Due to High Specular Reflection,” Machines, Vol.11, No.1, Article No.38, 2023. https://doi.org/10.3390/machines11010038
- [2] A. Matsushita, T. Morishita, S. Kaneko, H. Ohfuji, and K. Fukuda, “Image Detection of Seam Line for Laser Welding Robot,” J. Robot. Mechatron., Vol.23, No.6, pp. 919-925, 2011. https://doi.org/10.20965/jrm.2011.p0919
- [3] T. Takubo, E. Miyake, A. Ueno, and M. Kubo, “Welding Line Detection Using Point Clouds from Optimal Shooting Position,” J. Robot. Mechatron., Vol.35, No.2, pp. 492-500, 2023. https://doi.org/10.20965/jrm.2023.p0492
- [4] Z. Liu, Y. Yin, and Q. Wu, “On-Site Calibration Method for Outdoor Binocular Stereo Vision Sensors,” Optics and Lasers in Engineering, Vol.86, No.9, pp. 75-82, 2016. https://doi.org/10.1016/j.optlaseng.2016.05.015
- [5] J. Zhao, Y. Cheng, and G. Cai, “Correction Model of Linear Structured Light Sensor in Underwater Environment,” Optics and Lasers in Engineering, Vol.153, No.7, Article No.107013, 2022. https://doi.org/10.1016/j.optlaseng.2022.107013
- [6] Y. Li, J. Zhou, and F. Huang, “High Precision Calibration of Line Structured Light Sensors Based on Linear Transformation Over Triangular Domain,” 8th Int. Symposium on Advanced Optical Manufacturing & Testing Technology, 2016. https://doi.org/10.1117/12.2242945
- [7] R. Lyu, Z. Peng, Y. Lyu, L. Tian, and D. Zhu, “Relocalization-Based Hand-Eye Calibration Algorithm for Blade Robotic Grinding Systems,” China Mechanical Engineering, Vol.33, No.3, pp. 339-347, 2022 (in Chinese). https://doi.org/10.3969/j.issn.1004-132X.2022.03.010
- [8] M. Shah, “Solving the Robot-World/Hand-Eye Calibration Problem Using the Kronecker Product,” J. Mechanisms Robotics, Vol.5, No.3, pp. 1007-1013, 2013. https://doi.org/10.1115/1.4024473
- [9] H. Cui, R. Sun, Z. Fang, H. Lou, W. Tian, and W. Liao, “A Novel Flexible Two-Step Method for Eye-to-Hand Calibration for Robot Assembly System,” Measurement and Control, Vol.53, Nos.9-10, pp. 2020-2029, 2020. https://doi.org/10.1177/0020294020964842
- [10] A.-G. Li, Y. Hu, and Z. Ma, “Two Solutions for Calibration Equation AX=ZB,” J. of System Simulation, Vol.20, No.14, pp. 3670-3674, 2008 (in Chinese).
- [11] W. Wu, F. Guo, Y. Guo, and J. Guo, “Online Hand-eye Calibration Algorithm Based on Variation Particle Swarm Optimization,” J. of Huazhong University of Science and Technology (Nature Science Edition), Vol.48, No.1, pp. 7-12, 2020 (in Chinese).
- [12] X. Ye, Y. Tang, X. Hu, D. Zhang, and Q. Chen, “Research on Fast Target Positioning Method of Self-Calibration Manipulator,” Symmetry, Vol.13, No.11, Article No.2135, 2021. https://doi.org/10.3390/sym13112135
- [13] Y. Cheng, Y. Zhang, P. Wang, and R. Xiong, “An Autonomous Hand-Eye Calibration Method,” Proc. of the 18th Int. Conf. on Climbing and Walking Robots and the Support Technologies for Mobile Machines (CLAWAR’2015), pp. 545-554, 2015. https://doi.org/10.1142/9789814725248_0067
- [14] H. Wang, X. Lu, Z. Hu, and Y. Li, “A Vision-Based Fully-Automatic Calibration Method for Hand-Eye Serial Robot,” Industrial Robot, Vol.42, No.1, Article No.6373, 2015. https://doi.org/10.1108/IR-06-2014-0352
- [15] J. Gao, D. Liang, and Y. Chen, “A Hand-eye Calibration Method of Line Laser Profile Scanning Robot Based on Standard Cylinder,” Robot, Vol.44, No.3, pp. 321-332, 2022 (in Chinese). https://doi.org/10.13973/j.cnki.robot.210159
- [16] Z. Zhang, “A Flexible New Technique for Camera Calibration,” IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol.22, No.11, pp. 1330-1334, 2000. https://doi.org/10.1109/34.888718
- [17] K. M. Ahmad Yousef, B. J. Mohd, K. Al-Widyan, and T. Hayajneh, “Extrinsic Calibration of Camera and 2D Laser Sensors without Overlap,” Sensors, Vol.17, No.10, Article No.2346, 2017. https://doi.org/10.3390/s17102346
- [18] C. Kang, H. Wang, P. Zhang, S. Li, and S. Chen, “Study and Realization of Tool Coordinate Frame Calibration for Welding Robots,” J. of Beijing University of Technology, Vol.42, No.1, pp. 30-34, 2016 (in Chinese). http://dx.doi.org/10.11936/bjutxb2015020020
- [19] Y. Li, Z. Li, Y. Yang, L. Zhao, and L. Yang, “A Fast Recognition Algorithm of Ship Hatch in Bulk Cargo Terminal Based on Point Cloud Contour Extraction,” Measurement and Control, Vol.56, Nos.1-2, pp. 228-236, 2023. https://doi.org/10.1177/00202940221090967
- [20] X. Zhang, H. Yang, L. Bai, C. Zhang, and W. Yang, “Research on the Visual Positioning Method of Tunneling Equipment Based on the Improved RANSAC Feature Extraction,” Chinese J. of Scientific Instrument, Vol.43, No.12, pp. 168-177, 2022 (in Chinese). https://doi.org/10.19650/j.cnki.cjsi.J2209963
- [21] S. Wang, D. Du, W. Zhang, Q. Chen, and J. Shao, “Hand-Eye Calibration for the Robot by Measuring a Fixed Point from Different Poses,” J. of Tsinghua University (Science and Technology), Vol.47, No.2, pp. 165-168, 2007 (in Chinese). https://doi.org/10.16511/j.cnki.qhdxxb.2007.02.002
- [22] O. Sorkine-Hornung and M. Rabinovich, “Least-Squares Rigid Motion Using SVD,” Computing, Vol.1, No.1, 2017.
- [23] J. Jiang, X. Luo, Q. Luo, L. Qiao, and M. Li, “An overview of hand-eye calibration,” The Int. J. of Advanced Manufacturing Technology, Vol.119, No.1-2, pp. 77-97, 2022. https://doi.org/10.1007/s00170-021-08233-6
- [24] P. Tian, S. Yang, Z. Wu, Z. Li, P. Hu, and X. Qu, “An Optimal Hand-Eye Calibration Method for Robots Based on Precision Compensation,” J. of Xi’an Jiaotong University, Vol.54, No.08, pp. 99-106, 2020 (in Chinese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.