Paper:
Development of Two-Finger Robot that Performs In-Hand Rotation Using Center of Pressure Information
Aulia Khilmi Rizgi*
 , Ryohei Kurata*, Naoyuki Takesue*
, Yoshiyuki Toso**, Shinichi Kawabata**, Akira Tsunoda**, and Daichi Suzuki**
, Ryohei Kurata*, Naoyuki Takesue*
, Yoshiyuki Toso**, Shinichi Kawabata**, Akira Tsunoda**, and Daichi Suzuki**
*Tokyo Metropolitan University
6-6 Asahigaoka, Hino, Tokyo 191-0065, Japan
**KONICA MINOLTA, Inc.
2970 Ishikawa-cho, Hachioji, Tokyo 192-8505, Japan

We developed a two-finger robot that can grasp, rotate in-hand, and place an uneven object. To improve the success rate of in-hand rotation, three pressure sensors were mounted on each finger to detect the center of pressure (CoP) on each finger. Two approaches, called object on-the-fly adjustment and re-grasp object movement (ROM), were proposed to use the obtained CoP information to adjust the position of each finger before performing in-hand rotation and were compared with a general in-hand rotation movement. Evaluation experiments were conducted on several objects, and the effectiveness of the proposed approaches was demonstrated with the highest success rate of 93% for ROM compared with 63% for general in-hand rotation.
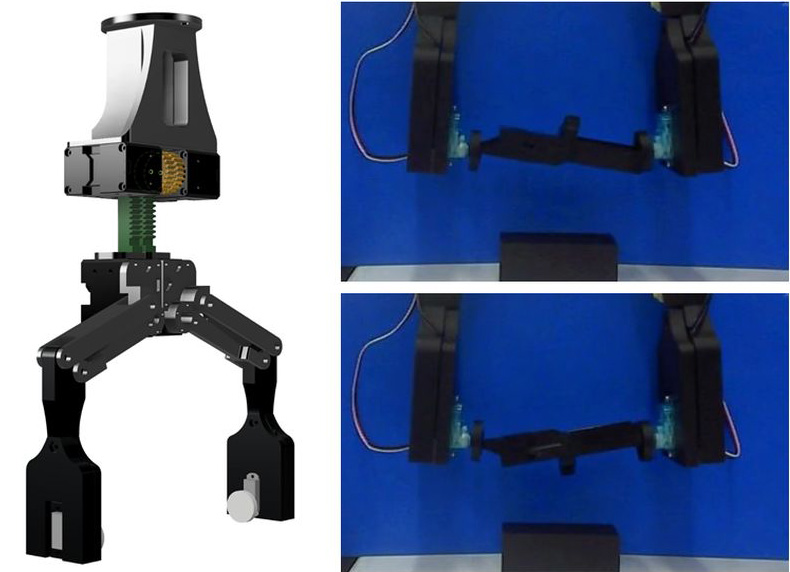
Two-finger robot that performs in-hand rotation using CoP
- [1] K. Nagata, “Manipulation by a parallel-jaw gripper having a turntable at each fingertip,” 1994 IEEE Int. Conf. on Robotics and Automation, Vol.2, pp. 1663-1670, 1994. https://doi.org/10.1109/ROBOT.1994.351352
- [2] K. Tahara, K. Maruta, and M. Yamamoto, “External sensorless dynamic object manipulation by a dual soft-fingered robotic hand with torsional fingertip motion,” 2010 IEEE Int. Conf. on Robotics and Automation, pp. 4309-4314, 2010. https://doi.org/10.1109/ROBOT.2010.5509816
- [3] H. Terasaki and T. Hasegawa, “Motion planning of intelligent manipulation by a parallel two-fingered gripper equipped with a simple rotating mechanism,” IEEE Trans. on Robotics and Automation, Vol.14, No.2, pp. 207-219, 1998. https://doi.org/10.1109/70.681241
- [4] A. Zhang, K. Koyama, W. Wan, and K. Harada, “Manipulation planning for large objects through pivoting, tumbling, and regrasping,” Applied Sciences, Vol.11, No.19, Article No.9103, 2021. https://doi.org/10.3390/app11199103
- [5] H. Kasaei, S. Luo, R. Sasso, and M. Kasaei, “Simultaneous Multi-View Object Recognition and Grasping in Open-Ended Domains,” Computing Research Repository, arXiv preprint, arXiv:2106.01866, 2021. https://doi.org/10.48550/arXiv.2106.01866
- [6] K. Hang, W. G. Bircher, A. S. Morgan, and A. M. Dollar, “Manipulation for self-identification, and self-identification for better manipulation,” Science Robotics, Vol.6, No.54, Article No.eabe1321, 2021. https://doi.org/10.1126/scirobotics.abe1321
- [7] A. Namiki, “Dexterous handling using a multifingered hand with finger rotation mechanism,” Int. Conf. on Advanced Mechatronics, pp. 439-443, 2010. https://doi.org/10.1299/jsmeicam.2010.5.439
- [8] M. Suhaib and S. Mukherjee, “Finger Gaiting for rotation of sphere by multifingered robot hand,” Conf. on Advances in Robotics (AIR’13), 2013. https://doi.org/10.1145/2506095.2506125
- [9] S. Yuan, A. D. Epps, J. B. Nowak, and J. K. Salisbury, “Design of a roller-based dexterous hand for object grasping and within-hand manipulation,” 2020 IEEE Int. Conf. on Robotics and Automation, pp. 8870-8876, 2020. https://doi.org/10.1109/ICRA40945.2020.9197146
- [10] S. Yuan, L. Shao, C. L. Yako, A. Gruebele, and J. K. Salisbury, “Design and control of roller grasper V2 for in-hand manipulation,” 2020 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 9151-9158, 2020. https://doi.org/10.1109/IROS45743.2020.9340953
- [11] S. Abondance, C. B. Teeple, and R. J. Wood, “A dexterous soft robotic hand for delicate in-hand manipulation,” IEEE Robotics and Automation Letters, Vol.5, No.4, pp 5502-5509, 2020. https://doi.org/10.1109/LRA.2020.3007411
- [12] M. Higashimori, H.-y. Jeong, I. Ishii, A. Namiki, M. Ishikawa, and M. Kaneko, “Development of four-fingered robot hand with dual turning mechanism,” J. of the Robotics Society of Japan, Vol.24, No.7, pp. 813-819, 2006 (in Japanese). https://doi.org/10.7210/jrsj.24.813
- [13] H. Qi, A. Kumar, R. Calandra, Y. Ma, and J. Malik, “In-hand object rotation via rapid motor adaptation,” Conf. on Robot Learning, 2022. https://doi.org/10.48550/arXiv.2210.04887
- [14] R. R. Ma and A. M. Dollar, “In-hand manipulation primitives for a minimal, underactuated gripper with active surfaces,” ASME 2016 Int. Design Engineering Technical Conf. and Computers and Information in Engineering Conf., Vol.5A: 40th Mechanisms and Robotics Conf., V05AT07A072, 2016. https://doi.org/10.1115/DETC2016-60354
- [15] R. R. Ma, A. Spiers, and A. M. Dollar, “M2 gripper: Extending the dexterity of a simple, underactuated gripper,” Advances in Reconfigurable Mechanisms and Robots II, pp. 795-805, 2015. https://doi.org/10.1007/978-3-319-23327-7_68
- [16] A. J. Spiers, B. Calli, and A. M. Dollar, “Variable-friction finger surfaces to enable within-hand manipulation via gripping and sliding,” IEEE Robotics and Automation Letters, Vol.3, No.4, pp. 4116-4123, 2018. https://doi.org/10.1109/LRA.2018.2856398
- [17] W. A. Friedl and M. A. Roa, “Experimental evaluation of tactile sensors for compliant robotic hands,” Frontiers in Robotics and AI, Vol.8, Article No.704416, 2021. https://doi.org/10.3389/frobt.2021.704416
- [18] Y. Suzuki, A. Ming, and M. Shimojo, “Construction of Center of Pressure (CoP) Tactile Sensor Using Conductive Paste,” 2015 JSME Conf. on Robotics and Mechatronics, 2A2-W04, 2015 (in Japanese). https://doi.org/10.1299/jsmermd.2015._2A2-W04_1
- [19] T. Yoneda, T. Bessho, Y. Suzuki, and R. Ozawa, “Application of center of pressure tactile sensor to grasping control of a robotic hand,” 2018 JSME Conf. on Robotics and Mechatronics, 2A2-M06, 2018 (in Japanese). https://doi.org/10.1299/jsmermd.2018.2A2-M06
- [20] W. Ruotolo, D. Brouwer, and M. R. Cutkosky, “From grasping to manipulation with Gecko-inspired adhesives on a multifinger gripper,” Science Robotics, Vol.6, No.61, 2021. https://doi.org/10.1126/scirobotics.abi9773
- [21] Z. Wang, Y. Makiyama, and S. Hirai, “A Soft Needle Gripper Capable of Grasping and Piercing for Handling Food Materials,” J. Robot. Mechatron., Vol.33, No.4, pp. 935-943, 2021. https://doi.org/10.20965/jrm.2021.p0935
- [22] R. Ozawa and K. Tahara, “Grasp and dexterous manipulation of multi-fingered robotic hands: A review from a Control View Point,” Advanced Robotics, Vol.31, Nos.19-20, pp. 1030-1050, 2017. https://doi.org/10.1080/01691864.2017.1365011
- [23] R. Kurata, A. K. Rizgi, K. Iwanaga, N. Takesue, Y. Toso, and A. Tsunoda, “Robotic Hand with In-hand Rotation Function for Entering Narrow Spaces,” The Proc. of Mechanical Engineering Congress, Japan, S113-07, 2022 (in Japanese). https://doi.org/10.1299/jsmemecj.2022.S113-07
- [24] T. Ario and I. Mizuuchi, “Planning the Shortest Carrying Trajectory Including Path and Attitude Change Considering Gripping Constraints,” J. Robot. Mechatron., Vol.34, No.3, pp. 607-614, 2022. https://doi.org/10.20965/jrm.2022.p0607
- [25] R. R. Ma and A. M. Dollar, “On dexterity and dexterous manipulation,” IEEE 15th Int. Conf. on Advanced Robotics, 2011. https://doi.org/10.1109/ICAR.2011.6088576
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.