Paper:
Development and Evaluation of Mobility and Excavation Rover Toward Lunar Base Construction
Masataku Sutoh

Japan Aerospace Exploration Agency
3-1-1 Yoshinodai, Chuo-ku, Sagamihara, Kanagawa 252-5210, Japan

The exploration and utilization of water resources on the Moon are of substantial global interest. To utilize lunar resources and construct bases, the construction machinery should travel over the lunar surface (which is mainly covered with powdery regolith) and excavate the regolith. However, various technical issues should be resolved to achieve this efficiently. In this study, a new platform rover was developed, and its motion behavior was analyzed to better understand the traveling and excavation behaviors of construction machinery on the Moon. The rover is a four-track vehicle equipped with a robotic arm consisting of a boom, arm, and bucket. To analyze the rover’s motion behavior in sandy terrain, we first developed a simulator based on terramechanics and performed a numerical analysis. Subsequently, various experiments were conducted using the rover in the JAXA Space Exploration Field, which simulates the lunar environment. In the experiments, the rover traveled over level and sloped terrains and excavated the ground. The simulation and experimental results revealed similar trends in the traveling and excavation behaviors of the rover. These results can serve as basic guidelines for the design and operation of construction machinery on the Moon.
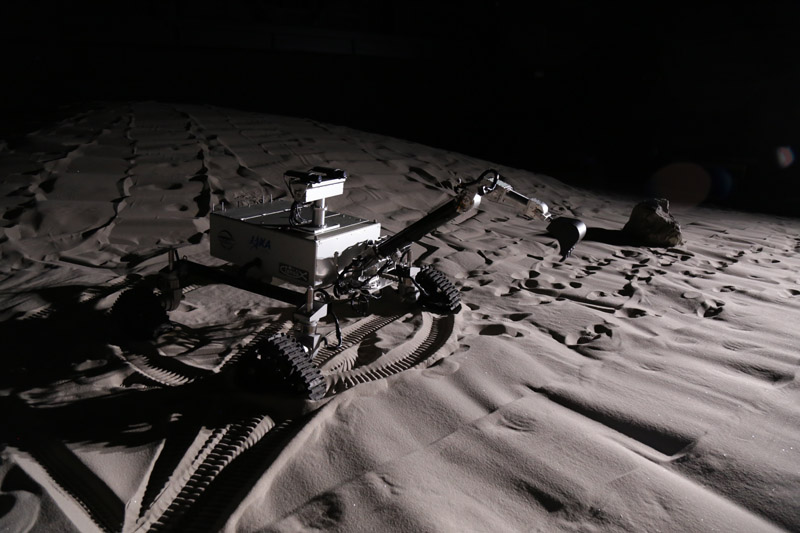
Platform rover for mobility and excavation
- [1] T. Hoshino, S. Wakabayashi, M. Ohtake, Y. Karouji, T. Hayashi, H. Morimoto, H. Shiraishi, T. Shimada, T. Hashimoto, H. Inoue, R. Hirasawa, Y. Shirasawa, H. Mizuno, and H. Kanamari, “Lunar Polar Exploration Mission for Water Prospection – JAXA’s Current Status of Joint Study with ISRO,” Acta Astronautica, Vol.176, pp. 52-58, 2020. https://doi.org/10.1016/j.actaastro.2020.05.054
- [2] A. Colaprete, D. Andrews, W. Bluethmann, R. C. Elphic, B. Bussey, J. Trimble, K. Zacny, and J. E. Captain, “An Overview of the Volatiles Investigating Polar Exploration Rover (VIPER) Mission,” AGU Fall Meeting Abstracts, Vol.2019, Article No.P34B-03, 2019.
- [3] K. Tateyama, “Achievement and Future Prospects of ICT Construction in Japan,” J. Robot. Mechatron., Vol.28, No.2, pp. 123-128, 2016. https://doi.org/10.20965/jrm.2016.p0123
- [4] M. Sutoh, K. Hamamoto, Y. Takagi, S. Komatsu, and S. Miura, “Remote Construction Experiment for Utilizing Water Resources on the Moon,” Space Resources Roundtable XXIII, 2023.
- [5] H. Yoshinada, “Construction Robot in the ImPACT Tough Robotics Challenge,” J. of the Robotics Society of Japan, Vol.37, No.9, pp. 824-828, 2019 (in Japanese). https://doi.org/10.7210/jrsj.37.824
- [6] F. Kanehiro, S. Nakaoka, T. Sugihara, G. Ishigami, and S. Ozaki, “Development of Robot Simulator,” J. of the Robotics Society of Japan, Vol.37, No.9, pp. 835-838, 2019 (in Japanese). https://doi.org/10.7210/jrsj.37.835
- [7] T. Yuasa, M. Ishikawa, and S. Ogawa, “An Optimal Design Methodology for the Trajectory of Hydraulic Excavators Based on Genetic Algorithm,” J. Robot. Mechatron., Vol.33, No.6, pp. 1248-1254, 2021. https://doi.org/10.20965/jrm.2021.p1248
- [8] H. Suzuki, G. Yamauchi, D. Endo, and T. Hashimoto, “Public Works Research Institute’s Efforts to Promote the Development of Autonomous Construction Technology,” J. of the Society of Instrument and Control Engineers, Vol.61, No.9, pp. 651-655, 2022 (in Japanese). https://doi.org/10.11499/sicejl.61.651
- [9] A. Nagahara, O. J. Peter, H. Suzuki, and G. Yamauchi, “Case Study of Development of Construction Simulator,” J. of the Society of Instrument and Control Engineers, Vol.61, No.9, pp. 656-660, 2022 (in Japanese). https://doi.org/10.11499/sicejl.61.656
- [10] M. G. Bekker, “Off-the-road Locomotion; Research and Development in Terramechanics,” University of Michigan Press, 1960.
- [11] J. Y. Wong, “Theory of Ground Vehicles,” John Wiley & Sons, 2008.
- [12] A. R. Reece, “The Fundamental Equation of Earth-Moving Mechanics,” Proc. of the Institution of Mechanical Engineers, Vol.179, No.6, pp. 16-22, 1964. https://doi.org/10.1243/PIME_CONF_1964_179_134_02
- [13] E. McKyes, “Soil Cutting and Tillage,” Elsevier, 1985.
- [14] K. Iagnemma and S. Dubowsky, “Mobile Robots in Rough Terrain: Estimation, Motion Planning, and Control With Application to Planetary Rovers,” Springer Science & Business Media, 2004. https://doi.org/10.1007/b94718
- [15] G. Ishigami, A. Miwa, K. Nagatani, and K. Yoshida, “Terramechanics-Based Model for Steering Maneuver of Planetary Exploration Rovers on Loose Soil,” J. Field Robotics, Vol.24, No.3, pp. 233-250, 2007. https://doi.org/10.1002/rob.20187
- [16] T. Kobayashi, H. Ochiai, Y. Suyama, S. Aoki, N. Yasufuku, and K. Omine, “Bearing Capacity of Shallow Foundations in a Low Gravity Environment,” Soils and Foundations, Vol.49, No.1, pp. 115-134, 2009. https://doi.org/10.3208/sandf.49.115
- [17] H. Nakashima, Y. Shioji, K. Tateyama, S. Aoki, H. Kanamori, and T. Yokoyama, “Specific Cutting Resistance of Lunar Regolith Simulant Under Low Gravity Conditions,” J. of Space Engineering, Vol.1, No.1, pp. 58-68, 2008. https://doi.org/10.1299/spacee.1.58
- [18] R. P. Mueller, “A Review of Extra-Terrestrial Regolith Excavation Concepts and Prototypes,” Earth and Space 2022, pp. 321-331, 2022.
- [19] J. Thangavelautham and Y. Xu, “The Design of Autonomous Robotic Technologies for Lunar Launch and Landing Pad (LLP) Preparation,” 2022 IEEE Aerospace Conf. (AERO), 2022. https://doi.org/10.1109/AERO53065.2022.9843755
- [20] M. P. Proctor, K. A. Johnson, F. Thomas, and Y. Hin Hau, “Force Measurements to Excavate Lightly Compacted Granular Lunar Soil Simulant GRC-3B,” Earth and Space 2021, pp. 200-210, 2021.
- [21] L. Xue, B. Chen, Z. Zhao, Z. Dang, and M. Zou, “Experimental Study of Torque Using a Small Scoop on the Lunar Surface,” Int. J. of Aerospace Engineering, Vol.2016, Article No.8035456, 2016. https://doi.org/10.1155/2016/8035456
- [22] T. Kubota, H. Kuninaka, K. Kawasaki, and Y. Katayama, “New Start of the Advanced Facility for Space Exploration,” Proc. of 2017 Symp. on Laboratory Experiment for Space Science, 2017 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.