Paper:
Dynamics-Based Control and Path Planning Method for Long-Reach Coupled Tendon-Driven Manipulator
Atsushi Takata*
 and Gen Endo**
and Gen Endo**
*Tokyo University of Agriculture and Technology
2-24-16 Naka-cho, Koganei-shi, Tokyo 184-8588, Japan
**Tokyo Institute of Technology
2-12-1 Ookayama, Meguro-ku, Tokyo 152-8550, Japan

The Fukushima power station in Japan was affected by a major earthquake and tsunami in March 2011, inspecting the primary containment vessel remains difficult due to high radioactivity. Long-reach robot arms are useful in inspecting such hazardous environments, and a coupled tendon-driven mechanism enables realizing a long, light-weight, and thin manipulator. However, high elastic elongation of tendons due to gravity may lead to unstable joint control. In this paper, we introduce dynamics-based control as a feasible strategy for a long-reach tendon-driven robotic arm. Additionally, a planning method to identify the joint angle path ensuring stability is proposed. Considering stability analysis, the potential due to the tendon elasticity and gravity is evaluated and used as an index of joint stability. The rapidly exploring random tree is used as the planning algorithm. The effectiveness of the proposed method was demonstrated through the successful manipulation of a 5-kg payload by a 10-m long robotic arm.
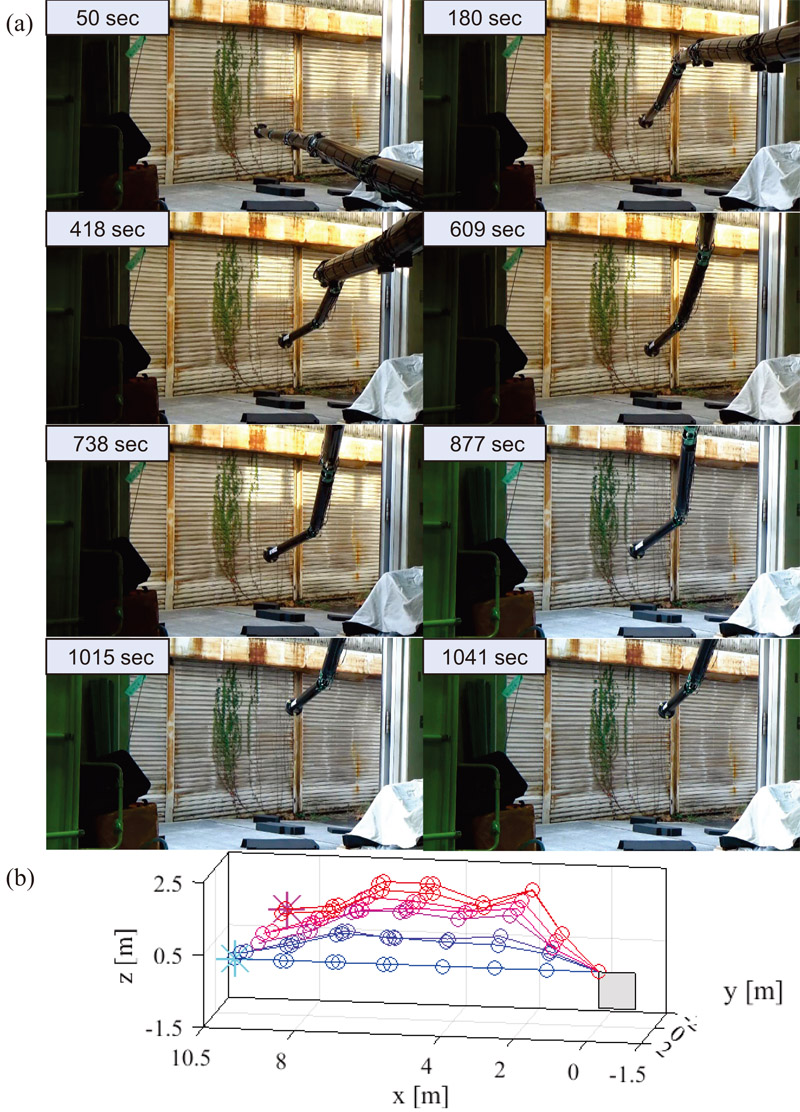
A planning method for joint angle path ensuring stability
- [1] Y. Yokokohji, “The use of robots to respond to nuclear accidents: Applying the lessons of the past to the fukushima daiichi nuclear power station,” Annual Review of Control, Robotics, and Autonomous Systems, Vol.4, No.1, pp. 681-710, 2021. https://doi.org/10.1146/annurev-control-071420-100248
- [2] K. Suzuki and K. Kawabata, “Development of a robot simulator for decommissioning tasks utilizing remotely operated robots,” J. Robot. Mechatron., Vol.32, No.6, pp. 1292-1300, 2020. https://doi.org/10.20965/jrm.2020.p1292
- [3] E. Rohmer, T. Yoshida, K. Ohno, K. Nagatani, S. Tadokoro, and E. Konayagi, “Quince: A collaborative mobile robotic platform for rescue robots research and development,” 5th Int. Conf. on Advanced Mechatronics (ICAM): Toward Evolutionary Fusion of IT and Mechatronics, pp. 225-230, 2010. https://doi.org/10.1299/jsmeicam.2010.5.225
- [4] T. Doi, M. Shimaoka, and S. Suzuki, “Creative robot contests for decommissioning as conceived by college of technology or kosen educators,” J. Robot. Mechatron., Vol.34, No.3, pp. 498-508, 2022. https://doi.org/10.20965/jrm.2022.p0498
- [5] J. Hirasawa, S. Isobe, Y. Kuramochi, M. Nishino, and Y. Nihei, “Development of multi-articulated tracked vehicle with a sensorless salvaging bucket for decommissioning,” J. Robot. Mechatron., Vol.34, No.3, pp. 551-558, 2022. https://doi.org/10.20965/jrm.2022.p0551
- [6] X. Sun, K. Hashimoto, T. Teramachi, T. Matsuzawa, S. Kimura, N. Sakai, S. Hayashi, Y. Yoshida, and A. Takanishi, “Planning and control of stable ladder climbing motion for the four-limbed robot “WAREC-1”,” 2017 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 6547-6554, 2017. https://doi.org/10.1109/IROS.2017.8206565
- [7] K. Asano, M. Obama, Y. Arimura, M. Kondo, and Y. Hitomi, “Multijoint inspection robot,” IEEE Trans. on Industrial Electronics, Vol.IE-30, No.3, pp. 277-281, 1983. https://doi.org/10.1109/TIE.1983.356738
- [8] B. Haist, S. Mills, and A. Loving, “Remote handling preparations for jet ep2 shutdown,” Fusion Engineering and Design, Vol.84, Nos.2-6, pp. 875-879, 2009. https://doi.org/10.1016/j.fusengdes.2009.01.050
- [9] Y. Perrot, L. Gargiulo, M. Houry, N. Kammerer, D. Keller, Y. Measson, G. Piolain, and A. Verney, “Long-reach articulated robots for inspection and mini-invasive interventions in hazardous environments: Recent robotics research, qualification testing, and tool developments,” J. of Field Robotics, Vol.29, No.1, pp. 175-185, 2012. https://doi.org/10.1002/rob.20422
- [10] T. Oka, N. Kimura, S. Wada, and S. Hirose, “Proposition of “truss arm”: A long-reach arm using a telescopic rod and truss structured coupled-driven wires,” 2023 JSME Conf. on Robotics and Mechatronics, 2A2-B10, 2023 (in Japanese).
- [11] S. Hirose and S. Ma, “Coupled Tendon-driven Multijoint Manipulator,” Proc. of 1991 IEEE Int. Conf. on Robotics and Automation, Vol.2, pp. 1268-1275, 1991. https://doi.org/10.1109/ROBOT.1991.131786
- [12] G. Endo, A. Horigome, and A. Takata, “Super dragon: A 10 m-long coupled tendon-driven articulated manipulator,” IEEE Robotics and Automation Letters, 2019. https://doi.org/10.1109/LRA.2019.2894855
- [13] A. Horigome, G. Endo, K. Suzumori, and H. Nabae, “Design of a weight-compensated and coupled tendon-driven articulated long-reach manipulator,” 2016 IEEE/SICE Int. Symposium on System Integration (SII), pp. 598-603, 2016. https://doi.org/10.1109/SII.2016.7844064
- [14] K. Osuka, “From model based control to dynamics based control: ‘explicit model’ and ‘implicit model’ in robotics,” Systems, Control and Information, Vol.43, No.2, pp. 94-100, 1999 (in Japanese). https://doi.org/10.11509/isciesci.43.2_94
- [15] A. Takata, H. Nabae, K. Suzumori, and G. Endo, “Tension control method utilizing antagonistic tension to enlarge the workspace of coupled tendon-driven articulated manipulator,” IEEE Robotics and Automation Letters, Vol.6, No.4, pp. 6647-6653, 2021. https://doi.org/10.1109/LRA.2021.3094489
- [16] M. Takegaki and S. Arimoto, “A New Feedback Method for Dynamic Control of Manipulators,” J. of Dynamic Systems, Measurement, and Control, Vol.103, No.2, pp. 119-125, 1981. https://doi.org/10.1115/1.3139651
- [17] R. Ozawa and H. Kobayashi, “Set-point force control of tendon-driven robotic mechanisms with nonlinear tendon elasticity,” J. of the Robotics Society of Japan, Vol.19, No.3, pp. 372-379, 2001 (in Japanese). https://doi.org/10.7210/jrsj.19.372
- [18] A. Takata, G. Endo, K. Suzumori, H. Nabae, Y. Mizutani, and Y. Suzuki, “Modeling of synthetic fiber ropes and frequency response of long-distance cable-pulley system,” IEEE Robotics and Automation Letters, Vol.3, No.3, pp. 1743-1750, 2018. https://doi.org/10.1109/LRA.2018.2803204
- [19] Y. Nakamura, H. Hanafusa, and T. Yoshikawa, “Task-priority based redundancy control of robot manipulators,” The Int. J. of Robotics Research, Vol.6, No.2, pp. 3-15, 1987. https://doi.org/10.1177/027836498700600201
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.