Review:
Development and Application of Robotics for Decommissioning of Fukushima Daiichi NPS by IRID
Naoaki Okuzumi*, Kenji Matsuzaki**, and Satoshi Okada***
*International Research Institute for Nuclear Decommissioning (IRID)
5F, 3 Toyokaiji Building, 2-23-1 Nishi-Shimbashi, Minato-ku, Tokyo 105-0003, Japan
**Toshiba Energy Systems & Solutions Corporation
8 Shinsugita-cho, Isogo-ku, Yokohama 235-8523, Japan
***Hitachi-GE Nuclear Energy, Ltd.
5-2-2 Omika-cho, Hitachi-shi, Ibaraki 319-1221, Japan

The most challenging task in the decommissioning of the Fukushima Daiichi Nuclear Power Station is to retrieve molten and solidified fuel debris, including in reactor internals. The International Research Institute for Nuclear Decommissioning (IRID) has developed various robots that can investigate the interior of a primary containment vessel (PCV) to clarify where fuel debris has accumulated and how it has formed. The scenarios of each unit caused by the accident are different; therefore, IRID has developed robots to satisfy the requirements of each unit. The robots can be categorized into three types: non-submersible robots driving through air, submersible robots swimming underwater, and investigation robots with arms that can extend to enter the PCV. This review focuses on the technological development of robots based on their functionality. Most of the robotic technology is acquired and utilized based on the results of subsidy projects for countermeasures for decommissioning and contaminated water granted by the Japanese government.
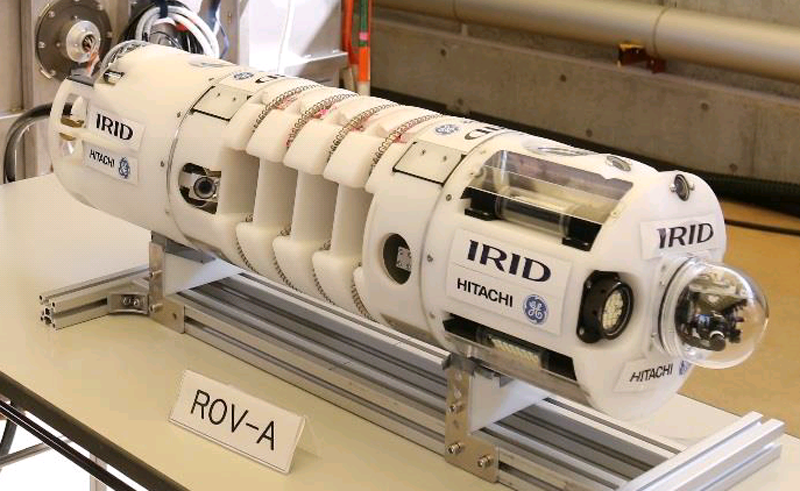
Overview of ROV-A
- [1] M. Kurata, N. Okuzumi, A. Nakayoshi, H. Ikeuchi, and S. Koyama, “Step-by-step challenge of debris characterization for the decommissioning of Fukushima-Daiichi Nuclear Power Station (FDNPS),” J. of Nuclear Science and Technology, Vol.59, No.7, pp. 807-834, 2022. https://doi.org/10.1080/00223131.2022.2040393
- [2] K. Ueno, S. Okada, and T. Tadokoro, “Fiber Optic-Type Dosimetry for Remote Measurement of Dose Rate Distribution in High Radiation and Narrow Environment,” J. of the Atomic Energy Society of Japan, Vol.62, No.12, pp. 717-721, 2020 (in Japanese). https://doi.org/10.3327/jaesjb.62.12_717
- [3] S. Okada, R. Kobayashi, and K. Ueno, “Development of Advanced Measurement Technologies and Their Application to Decommissioning of Fukushima Daiichi Nuclear Power Station,” Hitachi Review, Vol.71, No.4, pp. 111-115, 2022.
- [4] K. Ueda, C. Shimizu, T. Kobayashi, N. Sakamoto, N. Kume, A. Uranishi, and Y. Murai, “Development of Remotely Controlled Device for Investigation Inside Primary Containment Vessel at Fukushima Daiichi Unit 2,” Proc. of 27th Int. Conf. on Nuclear Engineering (ICONE27), Article No.1909, 2019. https://doi.org/10.1299/jsmeicone.2019.27.1909
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.