Paper:
Experimental Development of Fins for Underwater Robots
Bagus Yunanto*,**
 and Naoyuki Takesue*
and Naoyuki Takesue*
*Tokyo Metropolitan University
6-6 Asahigaoka, Hino, Tokyo 191-0065, Japan
**Politeknik Negeri Semarang
Jl. Prof. H. Soedarto S.H., Tembalang, Semarang, Central Java 50275, Indonesia

In recent years, underwater robotics has become very important because it can be applied to various fields such as underwater exploration, underwater inspection, marine industry, and environmental monitoring. Fin plays an essential role in the movement of underwater robots, providing operation, control, and efficient propulsion. This research aims to design and develop a unique robotic fin for underwater robots to improve their handling and propulsion efficiency. The goal is to improve the power density and propulsion efficiency of underwater survey robots. The study is based on a comprehensive analysis of experience and a performance evaluation. Five types of tail fin models were used in the study. The experimental results showed that the performance of the fin design can be compared with existing configurations under different conditions. The best design parameters will be determined by analyzing the experimental results. The results of this study will contribute to underwater robotics by providing a concept of the principles of fin design and its impact on the performance of robotics.
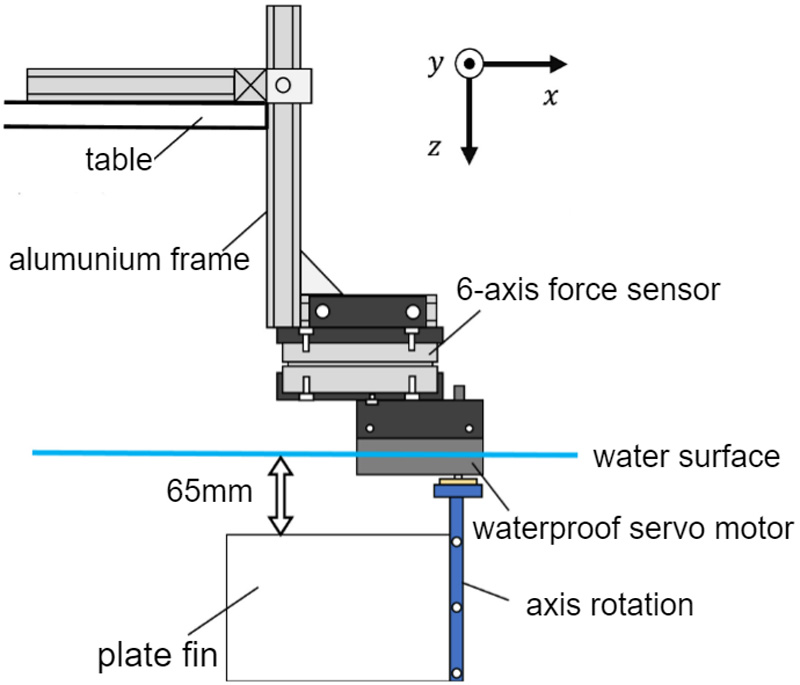
Experimental fin setup
- [1] N. Takesue, Y. Hata, and T. Sekiya, “Development of Fish-Like Robot with Elastic Fin,” Industrial Robot, Vol.38, No.3, pp. 252-257, 2011. https://doi.org/10.1108/01439911111122743
- [2] P. Duraisamy, R. K. Sidharthan, and M. N. Santhanakrishnan, “Design, Modeling, and Control of Biomimetic Fish Robot: A Review,” J. of Bionic Engineering, Vol.16, No.6, pp. 967-993, 2019. https://doi.org/10.1007/s42235-019-0111-7
- [3] J. Kadiyam, C. Mehta, S. Mohan, and D. Deshmukh, “Implementation of a robust motion control scheme for an Ostraciiform inspired underwater robot with caudal and pectoral fins,” IFAC-PapersOnLine, Vol.52, No.21, pp. 283-290, 2019. https://doi.org/10.1016/j.ifacol.2019.12.321
- [4] F. A. Naser and M. T. Rashid, “Design and implementation of a swimming robot with pectoral fins only,” Robotica, Vol.40, No.10, pp. 3557-3585, 2022. https://doi.org/10.1017/S0263574722000406
- [5] Z. Yu, K. Li, Y. Ji, and S. X. Yang, “Designs, motion mechanism, motion coordination, and communication of bionic robot fishes: A survey,” Intelligence & Robotics, Vol.2, No.2, pp. 180-199, 2022. https://doi.org/10.20517/ir.2022.10
- [6] J. Zhou, N. Yu, S. Liu, L. Xin, Y. Liu, G. Gao, Z. Na, and X. Hou, “Inspired by the black ghost knifefish: Bionic design of undulatory fin with 2-DOF rays and its propulsion performance,” Applied Bionics and Biomechanics, Vol.2023, Article No.7831175, 2023. https://doi.org/10.1155/2023/7831175
- [7] E. A. Martínez-García, R. Lavrenov, and E. Magid, “Robot fish caudal propulsive mechanisms: A mini-review,” AI, Computer Science and Robotics Technology, Vol.2022, 2022. https://doi.org/10.5772/acrt.09
- [8] Y. Shan, Y. E. Bayiz, and B. Cheng, “Efficient thrust generation in robotic fish caudal fins using policy search,” IET Cyber-Systems and Robotics, Vol.1, No.1, pp. 38-44, 2019. https://doi.org/10.1049/iet-csr.2018.0005
- [9] I. Yamamoto, Y. Terada, T. Nagamatu, and Y. Imaizumi, “Propulsion system with flexible/rigid oscillating fin,” IEEE J. of Oceanic Engineering, Vol.20, No.1, pp. 23-30, 1995. https://doi.org/10.1109/48.380249
- [10] F. Xie, Q. Zuo, Q. Chen, H. Fang, K. He, R. Du, Y. Zhong, and Z. Li, “Designs of the biomimetic robotic fishes performing body and/or caudal fin (BCF) swimming locomotion: A review,” J. of Intelligent & Robotic Systems, Vol.102, No.1, Article No.13, 2021. https://doi.org/10.1007/s10846-021-01379-1
- [11] Y.-C. Lin and D.-N. Zhang, “Experimental and numerical investigations on undulatory motion of a soft-fin-based underwater robot,” J. of Mechanics, Vol.38, pp. 273-283, 2022. https://doi.org/10.1093/jom/ufac021
- [12] M. K. Koiri, H. Kumar, P. K. Arora, and A. K. Sharma, “Design and optimization of caudal fin for robotic fish driven by crank-slotted slider and lever mechanism,” J. of Engineering Research, ICMET Special Issue, 2022. https://doi.org/10.36909/jer.ICMET.17187
- [13] Y. Takada, R. Araki, Y. Nakanishi, M. Nonogaki, K. Ebita, and T. Wakisaka, “Development of small fish robots powered by small and ultra-light passive-type polymer electrolyte fuel cells,” J. Robot. Mechatron., Vol.22, No.2, pp. 150-157, 2010. https://doi.org/10.20965/jrm.2010.p0150
- [14] Y. Takada, K. Koyama, and T. Usami, “Robotic fish,” J. Robot. Mechatron., Vol.26, No.3, pp. 391-393, 2014. https://doi.org/10.20965/jrm.2014.p0391
- [15] P. Duraisamy and M. N. Santhanakrishnan, “Hydrodynamic modeling and design of robotic fish using slender body theory,” IOP Conf. Series: Materials Science and Engineering, Vol.1012, Article No.012007, 2021. https://doi.org/10.1088/1757-899X/1012/1/012007
- [16] K. Divsalar, R. Shafaghat, M. Farhadi, and R. Alamian, “Experimental analysis on hydrodynamic coefficients of an underwater glider with spherical nose for dynamic modeling and motion simulation,” SN Applied Sciences, Vol.3, No.2, Article No.201, 2021. https://doi.org/10.1007/s42452-021-04241-z
- [17] L. Chen, S. Bi, Y. Cai, and H. Qiu, “Design and hydrodynamic experiment research on novel biomimetic pectoral fins of a ray-inspired robotic fish,” Machines, Vol.10, No.8, Article No.606, 2022. https://doi.org/10.3390/machines10080606
- [18] D. Yang and J. Wu, “Hydrodynamic interaction of two self-propelled fish swimming in a tandem arrangement,” Fluids, Vol.7, No.6, Article No.208, 2022. https://doi.org/10.3390/fluids7060208
- [19] S. B. Behbahani and X. Tan, “Role of pectoral fin flexibility in robotic fish performance,” J. of Nonlinear Science, Vol.27, No.4, pp. 1155-1181, 2017. https://doi.org/10.1007/s00332-017-9373-6
- [20] F. A. Naser and M. T. Rashid, “Enhancement of labriform swimming robot performance based on morphological properties of pectoral fins,” J. of Control, Automation and Electrical Systems, Vol.32, No.4, pp. 927-941, 2021. https://doi.org/10.1007/s40313-021-00712-1
- [21] F. Nose, Y. Sueoka, D. Nakanishi, Y. Sugimoto, and K. Osuka, “Design of fin-curvature-based feedback controller for efficient swimming,” J. Robot. Mechatron., Vol.33, No.4, pp. 955-967, 2021. https://doi.org/10.20965/jrm.2021.p0955
- [22] K. Shibuya, Y. Kishimoto, and S. Yoshii, “Depth control of underwater robot with metal bellows mechanism for buoyancy control device utilizing phase transition,” J. Robot. Mechatron., Vol.25, No.5, pp. 795-803, 2013. https://doi.org/10.20965/jrm.2013.p0795
- [23] F. Takemura, S. Kobashigawa, K. Hirayama, K. Kawabata, S. Sagara, H. Yamashiro, and E. Kuraya, “Development of an acetic acid injection device for crown-of-thorns starfish controlled by a remotely operated underwater robot,” J. Robot. Mechatron., Vol.27, No.5, pp. 571-578, 2015. https://doi.org/10.20965/jrm.2015.p0571
- [24] C. K.-C. Ng, P. A.-C. Ooi, W.-L. Wong, and G. Khoo, “A Review of fish taxonomy conventions and species identification techniques,” J. of Survey in Fisheries Sciences, Vol.4, No.1, pp. 54-93, 2017. https://doi.org/10.17762/sfs.v4i1.140
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.