Paper:
Door Opening and Closing Considering Forces Using a Mobile Manipulator with an Admittance Controlled Arm
Yasuhiko Fukumoto
 , Morio Jinnai, Shinnosuke Bando, Makoto Takenaka, and Hiroaki Kobayashi
, Morio Jinnai, Shinnosuke Bando, Makoto Takenaka, and Hiroaki Kobayashi
Kagawa Prefectural Industrial Technology Research Center
587-1 Goto, Takamatsu, Kagawa 761-8031, Japan

This study achieved four door operations, namely push-opening, push-closing, pull-opening, and pull-closing movements, using a mobile manipulator consisting of a commercially available arm robot and a mobile robot. We assumed that the arm robot is controlled by position commands at intervals of a few milliseconds, and that the mobile robot is guided by a simple straightforward linear trajectory. Ott, Borst, Bäuml, and Hirzinger proposed a push-opening method using impedance control in a cylindrical coordinate system for the arm robot. With this control, when the mobile robot advances toward and through the door, the arm robot moves passively and properly pushes the door open. However, their method is unsuitable for the above type of robot. Thus, we propose a method with two modifications: the use of admittance control and the improvement of force relaxation by considering a force obtained through a novel force decomposition. Furthermore, the proposed method was demonstrated not only in the push-opening movement but also in the push-closing, pull-opening, and pull-closing movements.
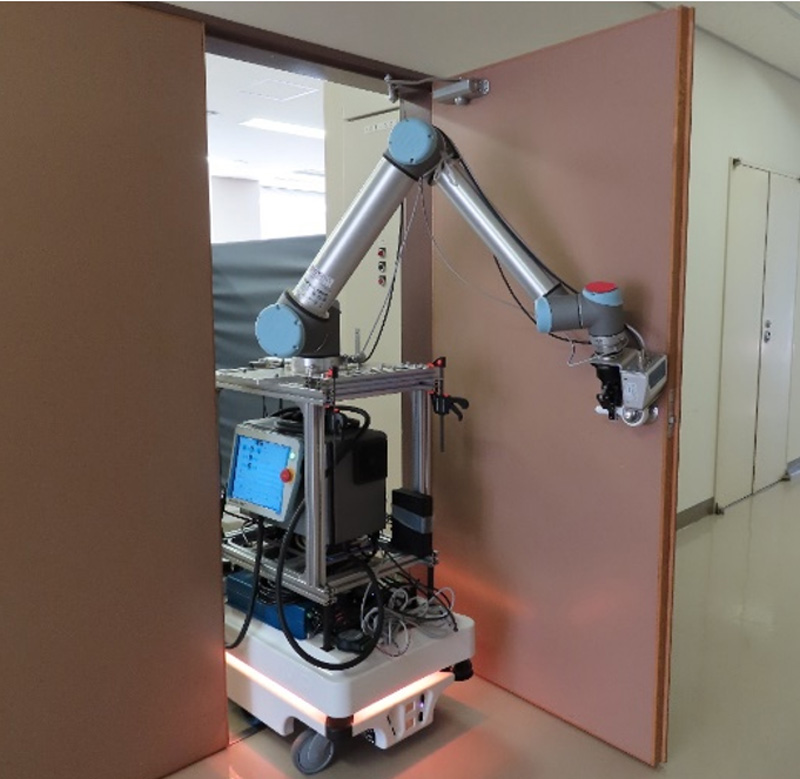
Door opening by a mobile manipulator
- [1] C. Ott, B. Bäuml, C. Borst, and G. Hirzinger, “Autonomous opening of a door with a mobile manipulator: A case study,” IFAC Proc. Volumes, Vol.40, No.15, pp. 349-354, 2007. https://doi.org/10.3182/20070903-3-FR-2921.00060
- [2] J. Ohwi, S. V. Ulyanov, and K. Yamafuji, “GA in continuous space and fuzzy classifier system for opening a door with a manipulator of mobile robot: New benchmark of evolutionary intelligent computing,” J. Robot. Mechatron., Vol.8, No.3, pp. 297-301, 1996. https://doi.org/10.20965/jrm.1996.p0297
- [3] T. Tanaka, J. Ohwi, L. V. Litvintseva, K. Yamafuji, and S. V. Ulyanov, “Intelligent control of a mobile robot for service use in office buildings and its soft computing algorithms,” J. Robot. Mechatron., Vol.8, No.6, pp. 538-554, 1996. https://doi.org/10.20965/jrm.1996.p0538
- [4] L. Peterson, D. Austin, and D. Kragic, “High-level control of a mobile manipulator for door opening,” Proc. of 2000 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS 2000), Vol.3, pp. 2333-2338, 2000. https://doi.org/10.1109/IROS.2000.895316
- [5] S. Chitta, B. Cohen, and M. Likhachev, “Planning for autonomous door opening with a mobile manipulator,” 2010 IEEE Int. Conf. on Robotics and Automation, pp. 1799-1806, 2010. https://doi.org/10.1109/ROBOT.2010.5509475
- [6] I. A. Şucan, M. Kalakrishnan, and S. Chitta, “Combining planning techniques for manipulation using real-time perception,” 2010 IEEE Int. Conf. on Robotics and Automation, pp. 2895-2901, 2010. https://doi.org/10.1109/ROBOT.2010.5509702
- [7] E. Lutscher, M. Lawitzky, G. Cheng, and S. Hirche, “A control strategy for operating unknown constrained mechanisms,” 2010 IEEE Int. Conf. on Robotics and Automation, pp. 819-824, 2010. https://doi.org/10.1109/ROBOT.2010.5509909
- [8] R. Hodoshima, K. Ueda, H. Ishida, M. Guarnieri, E. F. Fukushima, and S. Hirose, “Telerobotic control system to enhance rescue operations for arm-equipped tracked vehicle HELIOS IX,” J. Robot. Mechatron., Vol.26, No.1, pp. 17-33, 2014. https://doi.org/10.20965/jrm.2014.p0017
- [9] K. Nagahama, K. Takeshita, H. Yaguchi, K. Yamazaki, T. Yamamoto, and M. Inaba, “Estimating door shape and manipulation model for daily assistive robots based on the integration of visual and touch information,” 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 7660-7666, 2018. https://doi.org/10.1109/IROS.2018.8593391
- [10] M. V. Minniti, F. Farshidian, R. Grandia, and M. Hutter, “Whole-body MPC for a dynamically stable mobile manipulator,” IEEE Robotics and Automation Letters, Vol.4, No.4, pp. 3687-3694, 2019. https://doi.org/10.1109/LRA.2019.2927955
- [11] Y. Wu, E. Lamon, F. Zhao, W. Kim, and A. Ajoudani, “Unified approach for hybrid motion control of MOCA based on weighted whole-body Cartesian impedance formulation,” IEEE Robotics and Automation Letters, Vol.6, No.2, pp. 3505-3512, 2021. https://doi.org/10.1109/LRA.2021.3062316
- [12] M. Arduengo, C. Torras, and L. Sentis, “Robust and adaptive door operation with a mobile robot,” Intelligent Service Robotics, Vol.14, No.3, pp. 409-425, 2021. https://doi.org/10.1007/s11370-021-00366-7
- [13] Y. Sun, L. Zhang, and O. Ma, “Force-vision sensor fusion improves learning-based approach for self-closing door pulling,” IEEE Access, Vol.9, pp. 137188-137197, 2021. https://doi.org/10.1109/ACCESS.2021.3118594
- [14] H. Ito, K. Yamamoto, H. Mori, and T. Ogata, “Efficient multitask learning with an embodied predictive model for door opening and entry with whole-body control,” Science Robotics, Vol.7, No.65, Article No.eaax8177, 2022. https://doi.org/10.1126/scirobotics.aax8177
- [15] D. Pushkarev, K. Mironov, I. Basharov, M. Kichik, S. Linok, D. Yudin, M. Alhaddad, and A. Panov, “Door opening strategy for mobile manipulator with constrained configuration,” Proc. of the 7th Int. Conf. on Interactive Collaborative Robotics (ICR 2022), pp. 130-142, 2022. https://doi.org/10.1007/978-3-031-23609-9_12
- [16] C. C. Kessens, J. B. Rice, D. C. Smith, S. J. Biggs, and R. Garcia, “Utilizing compliance to manipulate doors with unmodeled constraints,” 2010 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 483-489, 2010. https://doi.org/10.1109/IROS.2010.5650927
- [17] A. Jain and C. C. Kemp, “Pulling open doors and drawers: Coordinating an omni-directional base and a compliant arm with equilibrium point control,” 2010 IEEE Int. Conf. on Robotics and Automation, pp. 1807-1814, 2010. https://doi.org/10.1109/ROBOT.2010.5509445
- [18] W. Meeussen et al., “Autonomous door opening and plugging in with a personal robot,” 2010 IEEE Int. Conf. on Robotics and Automation, pp. 729-736, 2010. https://doi.org/10.1109/ROBOT.2010.5509556
- [19] M. Stuede, K. Nuelle, S. Tappe, and T. Ortmaier, “Door opening and traversal with an industrial Cartesian impedance controlled mobile robot,” 2019 Int. Conf. on Robotics and Automation (ICRA), pp. 966-972, 2019. https://doi.org/10.1109/ICRA.2019.8793866
- [20] R. Diankov, S. S. Srinivasa, D. Ferguson, and J. Kuffner, “Manipulation planning with caging grasps,” 8th IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids 2008), pp. 285-292, 2008. https://doi.org/10.1109/ICHR.2008.4755966
- [21] Y. Karayiannidis, C. Smith, F. E. Viña, P. Ogren, and D. Kragic, “‘Open sesame!’ adaptive force/velocity control for opening unknown doors,” 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4040-4047, 2012. https://doi.org/10.1109/IROS.2012.6385835
- [22] M. Kalakrishnan, L. Righetti, P. Pastor, and S. Schaal, “Learning force control policies for compliant manipulation,” 2011 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4639-4644, 2011. https://doi.org/10.1109/IROS.2011.6095096
- [23] T. Winiarski and K. Banachowicz, “Opening a door with a redundant impedance controlled robot,” 9th Int. Workshop on Robot Motion and Control, pp. 221-226, 2013. https://doi.org/10.1109/RoMoCo.2013.6614612
- [24] S. Gu, E. Holly, T. Lillicrap, and S. Levine, “Deep reinforcement learning for robotic manipulation with asynchronous off-policy updates,” 2017 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3389-3396, 2017. https://doi.org/10.1109/ICRA.2017.7989385
- [25] S. Ando, R. Nagai, and Y. Inoue, “Automatic damping tuning of impedance control for assembly task,” J. of the Robotics Society of Japan, Vol.29, No.7, pp. 564-572, 2011 (in Japanese). https://doi.org/10.7210/jrsj.29.564
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.