Paper:
Robust Posegraph Optimization Using Proximity Points
Yuichi Tazaki
 , Kotaro Wada, Hikaru Nagano
, and Yasuyoshi Yokokohji
, Kotaro Wada, Hikaru Nagano
, and Yasuyoshi Yokokohji
Graduate School of Engineering, Kobe University
Rokkodai-cho, Nada-ku, Kobe, Hyogo 657-0013, Japan

This paper proposes a robust posegraph optimization (PGO) method for posegraphs with keypoints. In the conventional PGO formulation, a loop constraint is defined between a pair of nodes, whereas in the proposed method, it is defined between a pair of keypoints. In this manner, robust PGO based on switch variables can be realized in a more fine-grained manner. Loop constraint is defined based on the unique geometric property of proximity point, and implemented as a new edge type of the g2o solver. The proposed method is compared with other robust PGO methods using real world data recorded in Nakanoshima Robot Challenge 2021.
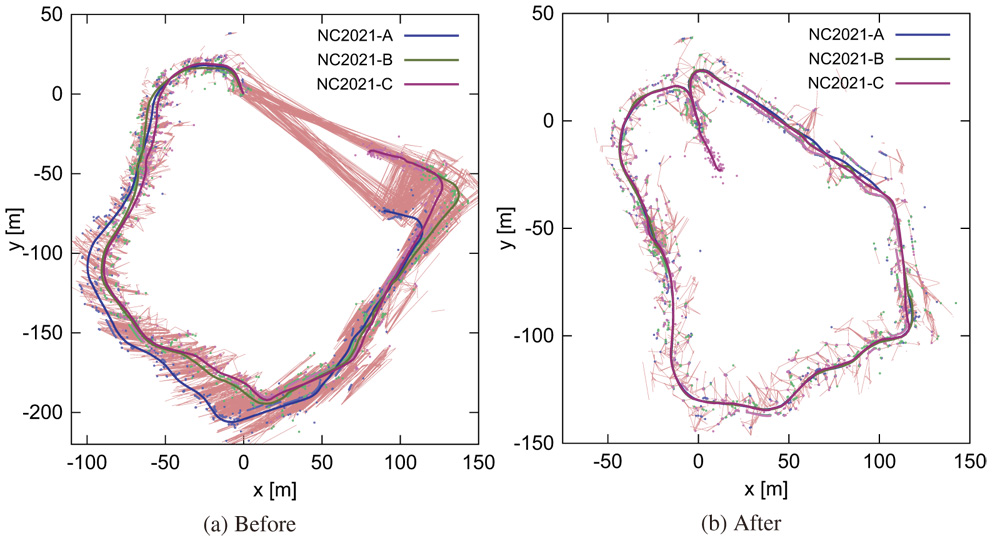
An example of robust posegraph optimization using proximity points
- [1] C. Cadena, L. Carlone, H. Carrillo, Y. Latif, D. Scaramuzza, J. Neira, I. Reid, and J. J. Leonard, “Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age,” IEEE Trans. on Robotics, Vol.32, No.6, pp. 1309-1332, 2016. https://doi.org/10.1109/TRO.2016.2624754
- [2] D. M. Cole and P. M. Newman, “Using laser range data for 3d slam in outdoor environments,” IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 1556-1563, 2006. https://doi.org/10.1109/ROBOT.2006.1641929
- [3] R. Kümmerle, G. Grisetti, H. Strasdat, K. Konolige, and W. Burgard, “g2o: A general framework for graph optimization,” IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3607-3613, 2011. https://doi.org/10.1109/ICRA.2011.5979949
- [4] N. Sünderhauf and P. Protzel, “Switchable constraints for robust pose graph slam,” IEEE Int. Conf. on Intelligent Robots and Systems (IROS), pp. 1879-1884, 2012. https://doi.org/10.1109/IROS.2012.6385590
- [5] N. Sünderhauf and P. Protzel, “Towards a robust back-end for pose graph slam,” IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 1254-1261, 2012. https://doi.org/10.1109/ICRA.2012.6224709
- [6] P. Agarwal, G. D. Tipaldi, L. Spinello, C. Stachniss, and W. Burgard, “Robust map optimization using dynamic covariance scaling,” 2013 IEEE Int. Conf. on Robotics and Automation, pp. 62-69, 2013. https://doi.org/10.1109/ICRA.2013.6630557
- [7] G. Hu, K. Khosoussi, and S. Huang, “Towards a reliable slam back-end,” IEEE Int. Conf. on Intelligent Robots and Systems (IROS), pp. 37-43, 2013. https://doi.org/10.1109/IROS.2013.6696329
- [8] G. Agamennoni, P. Furgale, and R. Siegwart, “Self-tuning m-estimators,” IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 4628-4635, 2015. https://doi.org/10.1109/ICRA.2015.7139840
- [9] F. Wu and G. Beltrame, “Cluster-based penalty scaling for robust pose graph optimization,” IEEE Robotics and Automation Letters, Vol.5, No.4, pp. 6193-6200, 2020. https://doi.org/10.1109/LRA.2020.3011394
- [10] Y. Tazaki, Y. Miyauchi, and Y. Yokokohji, “Loop detection of outdoor environment using proximity points of 3d pointcloud,” IEEE/SICE Int. Symposium on System Integration (SII), pp. 411-416, 2017. https://doi.org/10.1109/SII.2017.8279247
- [11] Y. Tazaki and Y. Yokokohji, “Outdoor autonomous navigation utilizing proximity points of 3d pointcloud,” J. Robot. Mechatron., Vol.32, No.6, pp. 1183-1192, 2020. https://doi.org/10.20965/jrm.2020.p1183
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.